OxTS has released the xRED3000, its lightest and smallest inertial navigation system (INS) suitable for land- and air-based applications.
Combining two survey-grade GNSS receivers and OxTS’ latest IMU10 inertial technology, the xRED3000 is designed to be the GNSS/INS component for products requiring accurate localization, even in harsh environments.
The xRED3000 uses OxTS lidar inertial odometry (LIO), which takes data from a lidar in post-processing to reduce IMU drift and improve accuracy in areas with poor or no GNSS signal such as urban canyons. The technology also provides a position accuracy of 0.5 m, even after 60 seconds of no GNSS signal.
The INS is compatible with OxTS Georeferencer, a post-processing and calibration software that aims to improve the accuracy and clarity of user’s pointcloud data. It warms up to specification in three minutes, even with low-dynamic movement, increasing flight time for aerial applications and reducing the space needed for land-based warmups.
Syntony GNSS has released CERBER, a GNSS receiver embedded in a CRPA solution.
A classic CRPA system consists of embedded GNSS antennas and antijamming treatments. However, CERBER relies on the tight integration of a CRPA treatment (with a 4-array antenna) and the embedded GNSS receiver.
The estimation of GNSS direction of arrival (DoA) is enabled and allows the receiver to check whether those DoA estimations are compatible with GNSS constellations or originate from very few directions. Therefore, users will be able to detect and locate spoofing devices or receivers instantly.
The receivers are also able to constantly recalibrate the chains of reception based on the DoA and GNSS signals.
CERBER’s embedded approach also enables a 6dB power gain in satellites’ directions, the continuity of GNSS signals’ phase when the space-time adaptive processing (STAP) filter is updated, the absence of additional noise that a GNSS receiver would imply with the re-generation and re-digitalization of RF signals and an improved rejection performance when compared to a classic CRPA + independent GNSS receiver solution.
This technology is designed for the protection and the surveillance of civil critical infrastructures, including Galileo’s and EGNOS’ ground segments, airports or any infrastructure requiring precise and resilient GNSS timing.
Hexagon’s Autonomy & Positioning division and Munhwa Broadcasting Corporation (MBC) have partnered to bring precise positioning to South Korea through the TerraStar-X Enterprise Correction Service. The hardware-agnostic correction service provides instant convergence and lane-level accuracy in automotive, mobile and autonomous applications.
As a leader in real-time kinematic (RTK) positioning across South Korea, MBC’s atmospheric data enhances the redundancy of Hexagon’s fast converging and reliable precise point positioning (PPP) network across the country. Through this collaboration, the TerraStar-X Enterprise service is now supported in testbeds across South Korea, China, Japan, Europe, and North America to accelerate development for advanced driver assistance systems, safety-critical applications, micromobility, industrial and smartphone applications.
“With TerraStar-X Enterprise Correction Services now available across autonomous and consumer market applications, developers can design once and then deploy that design at scale worldwide,” said Paul Verlaine Gakne, positioning services product manager at Hexagon’s Autonomy & Positioning division. “TerraStar-X Enterprise is designed to be as flexible as possible for large-scale testing and deployment.”
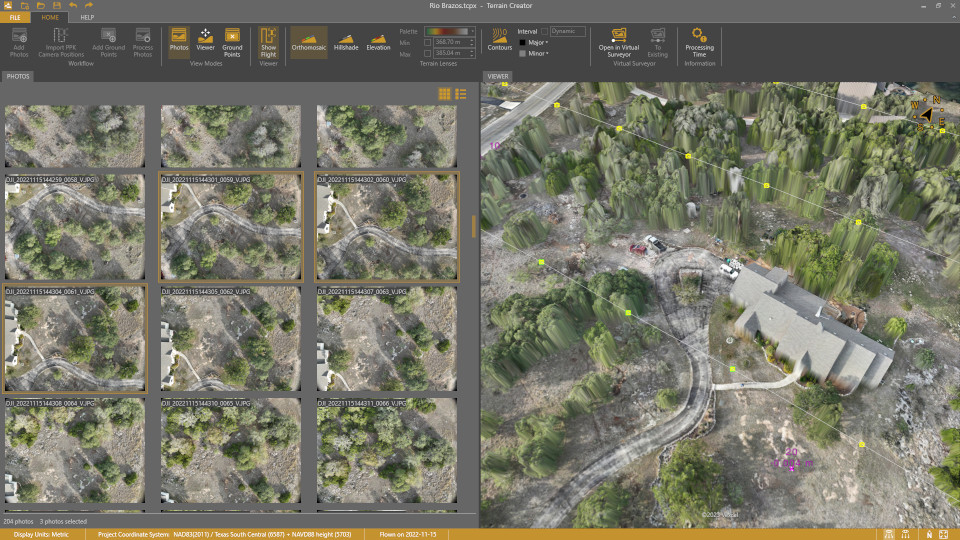
Virtual Surveyor has added UAV photogrammetry capabilities to its Virtual Surveyor smart UAV surveying software. The new Terrain Creator app photogrammetrically processes UAV images to generate survey-grade terrains which then transfer into the traditional Virtual Surveyor workspace.
The Virtual Surveyor software is now two desk apps in one subscription package, creating a seamless end-to-end UAV survey workflow, said Tom Op‘t Eyndt, Virtual Surveyor’s CEO.
Terrain Creator aims to simplify the aerial photogrammetry process by offering a visual and intuitive application to produce an orthomosaic and digital surface model (DSM) from UAV photos, the company said.
Virtual Surveyor software was originally developed to bridge the gap between UAV photogrammetric processing applications and engineering design packages.
Prior to this new release, users had to rely on third-party software to generate elevation models and an orthomosaic on which they could work with the Virtual Surveyor toolset. Now, users can derive the 3D topographic information necessary for construction, surface mining and excavation projects in one package.
Once the survey-grade terrains flow from the Terrain Creator into the Virtual Surveyor desktop app, users can access an interactive virtual environment and robust toolsets to generate CAD models, create cut-and-fill maps and calculations, or calculate volume reports.
Users currently subscribed to Virtual Surveyor Ridge and Peak editions will see their software updated automatically with Terrain Creator. A flexible licensing setup will allow two users within a subscribing organization to use the Terrain Creator and Virtual Surveyor applications simultaneously from different computers.
The Radio Technical Commission for Aeronautics (RTCA) has released a six-file document titled “DO-401 Minimum Operational Performance Standards (MOPS) for Dual-Frequency Multi-Constellation Satellite-Based Augmentation System Airborne Equipment.”
The document is designed to support validation of airborne requirements when using dual-frequency GPS, Galileo and satellite-based augmentation system (SBAS) signals as defined by International Civil Aviation Organization Standards and Recommended Practices (Annex 10, Volume I, Amendment 93), as well as the development of dual-frequency multi-constellation SBAS services.
The SBAS MOPs document does not provide specifications for a production approval.
The RCTA stated that a future release of the document will provide requirements supporting production approval, typically through a new Technical Standard Order or European Technical Standard Order.
The facility is designed to boost the manufacturing of the company’s world-first AI navigation systems for GPS-denied environments, including its digital fibre-optic gyroscope (DFOG) technology, Boreas.
Advanced Navigation is one of only four companies across the globe able to manufacture strategic-grade fiber-optic gyroscopes, which are designed to enable reliable navigation for marine vessels, space missions, aerospace, defense, autonomous vehicles and flying taxis.
The new facility will be home to extensive research collaborations between Advanced Navigation and the University of Technology Sydney. The collaborations aim to accelerate the production of new technologies, including its light detection, altimetry, and velocimetry (LiDAV) system, cloud ground control and indoor positioning technology designed to guide visually impaired passengers in underground train stations.
The new facility is aligned with the Australian government’s ongoing commitment towards building a STEM workforce and aims to boost employment in robotics, manufacturing, photonics, mechatronics, mechanical engineering and more.
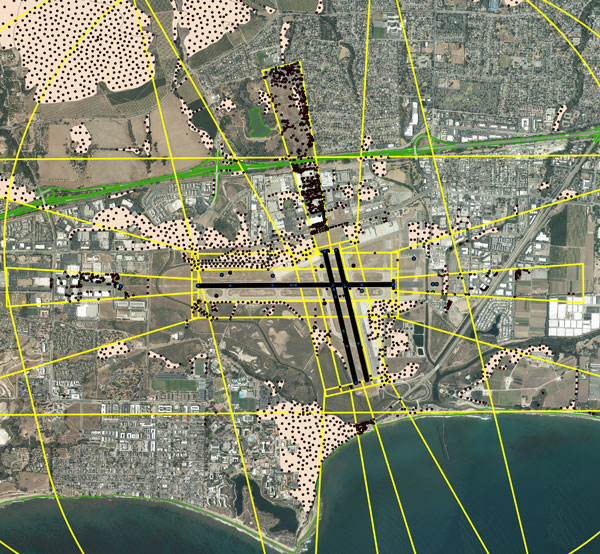
NV5 Geospatial, a large geospatial data company, provides services for airport projects across the United States and U.S. territories — mainly supporting airport planning and engineering firms that must meet FAA survey and mapping requirements for data collection at airports. “We generally are a sub-consultant to them, helping them achieve those survey standards for collecting the data and submitting it to the FAA,” said David Grigg, the company’s Aviation Program Director. Typically, this is around planning projects such as airport layout plans and master plans, but also engineering projects such as runway extensions and runway reconstructions.
As an example, Grigg cited the extension of a runway, which requires new flight procedures to be established. “Two survey missions are required for runway extensions. The primary mission is to establish control for the aerial imagery. Using the imagery, control and design data, we check for obstacles photogrammetrically. That data is sent to the FAA and procedures are developed. After construction is complete, we go back to the airport to survey the changed runway and navigational aids (NAVAIDS) to verify that what was designed was ultimately built.”
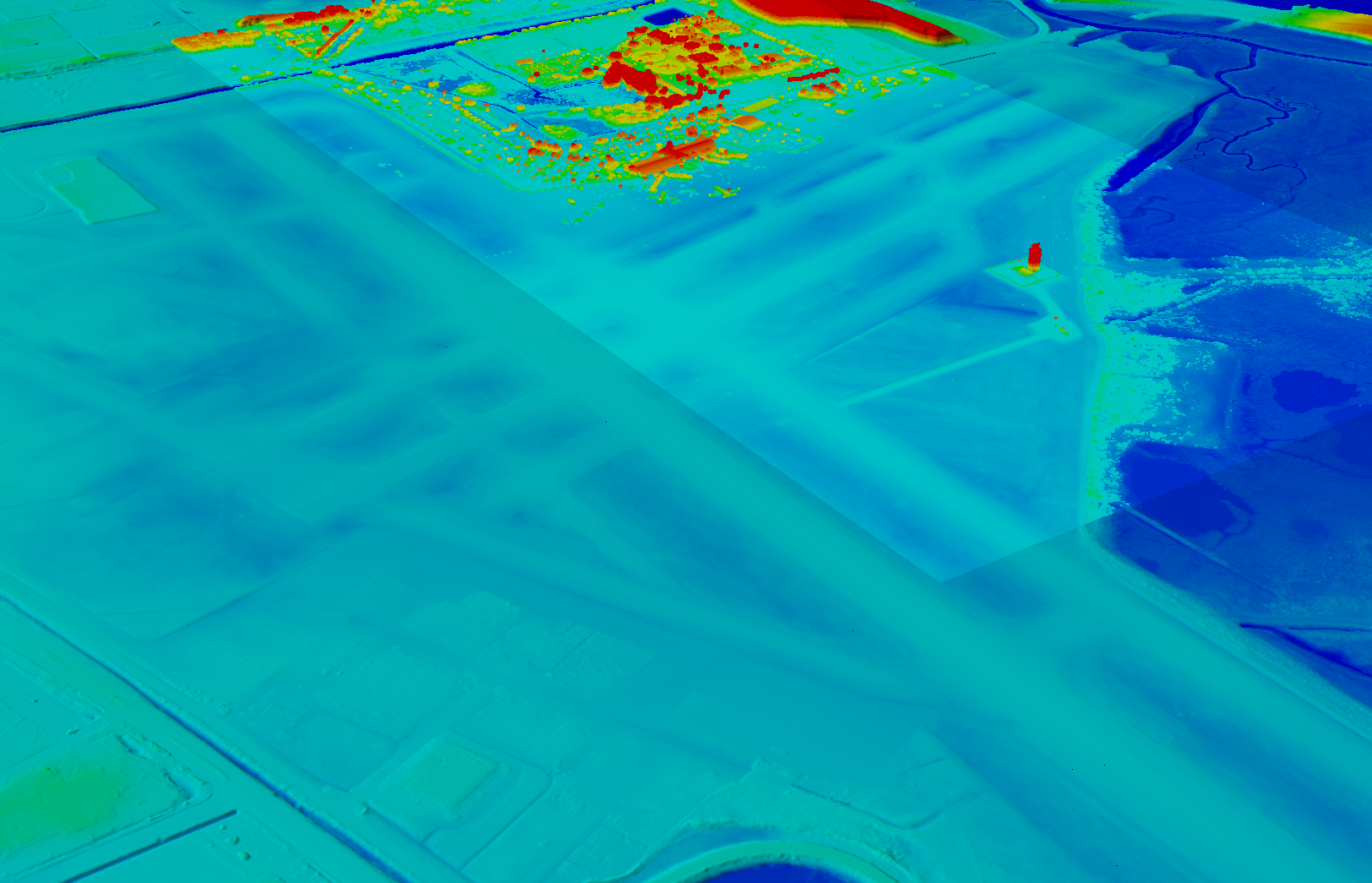
Another way in which NV5 Geospatial supports airport clients is by conducting obstruction studies around them for vegetation management. “That’s generally where we pull in the lidar surveys,” said Grigg. The FAA’s standards for relative and absolute positioning accuracy for trees are “rather generous” by surveying standards, he said. “We’re talking two to three feet vertically and twenty feet horizontally. It’s not like a typical mapping job where you’re guaranteeing it to one foot or better horizontally and half foot or better vertically.”
The FAA, he points out, has published guidance on how lidar may be used. “We mostly use aerial photogrammetry to support projects in the FAA’s airports GIS program. When we collect lidar at an airport, we do it to generate contours and to identify individual tree canopies. Our lidar-derived data is most often developed to benefit airports for tree mitigation not for FAA airports GIS survey projects.”
Image: NV5 Geospatial
On the other hand, the FAA has strict requirements regarding metadata to document when, where, and how each control point is collected. “At the time of the survey, photographs are taken of the GPS units from different angles and cardinal directions,” Grigg said. “This is visual documentation for NGS that the surveyed point is at the location described. ”
Another challenge for surveyors working at airports is that they are required to pull back for incoming aircraft. “Obviously, you will have some logistical issues at busy airports,” said Grigg. Surveyors are required to have special lights and markings on any vehicles that enter the airport property to ensure ground and air visibility. Aircraft movement also impacts surveyors as they must move away from the runway safety area (RSA) for take-offs and landings. Busier airports are surveyed at night, when air traffic is reduced or runways are closed.
Image: NV5 Geospatial
A typical project for a small airport takes about nine months, while for bigger airports — such as Chicago O’Hare, Dallas-Fort Worth, or Hartsfield-Jackson Atlanta — they can take up to twice as long. “The large hubs update their master plan on a more reoccurring basis, such as every three to five years,” said Doug Fuller, NV5 Geospatial’s Airport Solutions Specialist. “As the airports get smaller, you start stretching out that timeframe.”
Airport survey requirements
[The following was written by NV5 Geospatial and only lightly edited by GPS World.]
Airports have surveys conducted for many different reasons. However, all survey types require the collection, classification and reporting of accurate data about the project. The methodology selected to gather the information is up to the professional surveyor’s judgment. Some features require observation through ground field methods, while others lend themselves to collection via remote sensing technologies.
All surveys start with a search for existing airport control, which are called Primary Airport Control Points (PACS) and Secondary Airport Control Points (SACS). These are points on the airport that have been adjusted by the National Geodetic Survey (NGS). This ensures that the survey is done on the National Spatial Reference System (NSRS).
A typical survey includes surveying the runway, the end points, any displaced thresholds, and a profile along the centerline of the runway. If the centerline marker is not in the correct location or if it is not there at all, the surveyor will make the necessary measurements to establish the proper location and set a new marker. Next the surveyor must locate all NAVAIDS and survey them at the proper location as described in FAA Advisory Circular 150/5300-18B.
After the NAVAIDS are located, the photo control survey will be done. This still requires the PACS and SACS to be the points of origin of the survey. The base requirement as described in FAA Advisory Circular 150/5300-16C is to survey ten photo control points and five check points. The check points are sent to NGS’s Online Positioning User Service (OPUS). This is used to check that the survey was done on the NSRS and that the compilation meets FAA standards.
The standards the surveyor must meet vary depending on the equipment type or photo control point. Examples of the accuracy requirements for the NAVAIDS are as follows:
Point
Horizontal
Vertical
Distance measuring equipment
+/- 1 ft
+/- 1 ft
Glideslope
+/- 1 ft
+/- 0.25 ft
Inner marker
+/- 10 ft
+/- 20 ft
Localizer
+/- 1 ft
+/- 0.25 ft
Runway end point
+/- 1 f ft
+/- 0.25 ft
Runway profile points
+/- 1 f ft
+/- 0.25 ft
Photo control
+/- 1 ft
+/- 1 ft
PACS and SACS
X
Y
Z
Ellip.
Inverse from PACS to SACS
surveyed relative to published
0.09 ft
0.09 ft
0.15 ft
0.13 ft
When surveying on airport property, the largest challenge is always accessing the runway safety area to locate the runway ends and profiles. At small airports Surveyors must work when the runway is not busy; at airports with FAA control towers when the runway is closed. Frequently this is done overnight. Other challenges include access to the FAA NAVAIDS. Some of them must be turned off to be surveyed and others require survey points on which it is not possible to set an instrument. When we are not able to occupy a point, we collect it by surveying multiple equidistant locations around the NAVAID and averaging them.
Image: NV5 Geospatial
NV5 Geospatial surveyors use a combination of real-time (R/T) and post-processing techniques. We also use OPUS with the PACS and SACS and the five check points. Once the PACS and SACS have been determined to be stable, the proper coordinates are applied to them and the R/T points are adjusted using Trimble Business Center (TBC). NV5 Geospatial uses Trimble TRM-R8s and we recently added TRM-R12i receivers to our equipment. We use ground control points to orient the photography and to calibrate the lidar.
“Seen & Heard” is a monthly feature of GPS World magazine, traveling the world to capture interesting and unusual news stories involving the GNSS/PNT industry.
UK begins UAV deliveries
Image: Screenshot of video by BBC
Royal Mail and UAV company Skyports have launched the Orkney I-Port operation to distribute letters and packages between the Orkney Islands, Scotland, reported the BBC. In partnership with the council’s harbor authority and Scottish airline Loganair, mail will be transported from Royal Mail’s Kirkwall delivery office to the city of Stromness in Orkney. UAVs will then carry items to the islands of Graemsay and Hoy, where postal staff will complete the delivery routes. The UAV service will initially operate for three months and may continue on a permanent basis under existing regulatory frameworks due to Orkney’s unique landscape and the proximity of the islands to one another. The UAV service aims to improve service levels and delivery times to Graemsay and Hoy, as weather and geography typically cause disruption to delivery services. The use of UAVs to deliver mail also may bring significant safety improvements by ensuring that postal workers can deliver between ports without risk.
GNSS is taking a hike, literally
Image: Aleksandar Georgiev/iStock/Getty Images Plus/Getty Images
In July, officials in Taichung City, Taiwan, launched a GNSS-based app to aid lost hikers and to mitigate risk associated with outdoor activities in the area’s mountainous region, reported Tapei Times. The app was developed by the Taichung Fire Bureau in response to a surge in outdoor activities after the COVID-19 pandemic restrictions were lifted and, subsequently, an increase in medical emergencies linked to mountain activities. Wi-Fi towers have been built at major trailheads such as Toukeshan, Anmashan, Fushoushan and Snow Mountain to supplement the app as well as to help facilitate UAV deployment to find lost hikers.
In a biological preserve in Mexico’s Campeche state, a team of archaeologists have documented pyramids, palaces, a ball court and other remains of an ancient city they call Ocomtún, reported The New York Times. Archeologists surveyed the site for six weeks in May and June, finding 50-foot-tall structures resembling pyramids, as well as pottery and Mayan engravings they believe date to between 600 AD and 900 AD. The team determined the city was likely abandoned more than 1,000 years ago. Surveying of the area has been revolutionized over the past decade by lidar — allowing researchers to survey densely forested areas that are difficult to explore on foot. Archeologists were able to use airborne lasers to pierce through dense vegetation and reveal the ancient structures and human-modified landscapes beneath.
More than 350 UAVs were lost during a practice light display show in Melbourne, Australia, on July 14, ahead of a scheduled performance for the opening of the women’s World Cup. The UAVs appeared to stop mid-show and plummet into the Yarra River. Divers have since fished out hundreds of the UAVs. According to the Resilient Navigation and Timing Foundation, the likely cause of the mass-crash was interference with GPS signals.
Autonomous vehicles are a truly fascinating innovation. Most modern vehicles on roadways around the world have some level of autonomy, ranging from Level 1 features such as cruise control to Level 5 fully autonomous features such as the ability to monitor roadway conditions and perform safety-critical tasks without intervention by a human driver.
Even though autonomous vehicles have been continually developed and tested for years, adoption has been minimal. According to the University of Michigan Center for Sustainable Systems, a majority of researchers, manufacturers and experts predict widespread adoption of Level 5 autonomous vehicles by 2030 or later.
Several barriers have delayed the adoption of autonomous vehicles, such as concerns about safety, data security and cyberattacks; lack of consumer demand; liability laws and lack of regulatory legislation; and doubts as to their economic viability.
While their adoption is slow, autonomous vehicles have been widely praised for the range of benefits they would provide. According to the U.S. National Highway Traffic Safety Administration, they include: much greater road safety due to features such as advanced driver assistance systems, lidar, cameras, inertial navigation systems and more; greater independence for people with disabilities, senior citizens and low-income individuals; reduced road congestion due to the lower number of crashes and an increase in ride-sharing; and environmental benefits as the automotive industry transitions to all-electric vehicles.
Several technology and automotive companies also have seen the potential benefits of autonomous vehicles for many applications and the potential impact they could have on communities worldwide. In response, these companies have supported autonomous vehicle innovation and adoption by offering new products and working closely with educators, nonprofit organizations and other groups who aim to leverage it to connect the world.
Education meets automated racing
Safran Electronics & Defense, which specializes in resilient positioning, navigation and timing (PNT) solutions, has advanced the adoption of autonomous vehicles with its simulation software while simultaneously supporting current students in their academic pursuits.
To jointly develop future PNT technology and solutions Safran’s Minerva Academic Partnership Program supports partnerships with the academic community by providing its technology for student-led research projects that use GNSS signals. Leisa Butler, the program’s chair, elaborated on its mission: “Collaborating with our customers in academia while advancing PNT education is the program’s core purpose. We provide members with access to our powerful Skydel GNSS simulation engine.”
Safran and auburn university students are pictured with their autonomous F1 race car that competed in the Indy Autonomous Challenge on the Las Vegas Motor Speedway at CES 2023. Auburn students used Skydel, a Safran simulation engine, to improve the capabilities of the car and to learn how to make it safe and reliable on the track. (Image: Safran Electronics & Defense)
As a part of the program, Safran has a long-established partnership with Auburn University’s College of Engineering. Safran and Auburn University students participated in the Indy Autonomous Challenge, which took place on January 7, at the Las Vegas Motor Speedway during the 2023 Consumer Electronics Show. Nine autonomous Formula 1 race cars, representing colleges and universities from around the world, took part in a head-to-head driverless racing competition with some vehicles reaching speeds of more than 190 mph.
Safran has supported Auburn students before, during, and after this challenge by enabling them to leverage its GNSS simulators, such as Skydel and the GSG-8, which are used in the university’s autonomous vehicle lab. Butler said that giving students access to the simulation software prior to the high-speed races helped them troubleshoot and test the vehicles and improve the results.
“Resolving issues in the lab improves safety while saving time and money,” Butler stated. “The Indy car features multiple antennas. Since Skydel can support multiple instances simultaneously, the team can test heading and realistic scenarios in a simulated environment. This is before they race next to other vehicles at high speeds.
Safran also supports the general advancement of autonomous vehicle technology. Positioning and navigating autonomous vehicles involves the use of multiple technologies, including GNSS.
“Skydel is a valuable tool for the autonomous vehicle industry that wants realistic lab testing because it can support multiple, independent trajectories or antenna outputs simultaneously,” Butler said. She also pointed to the importance of developing mitigation techniques against jamming and spoofing.
“Using a simulator with the Skydel engine allows the user to test in all sorts of challenging environments before putting the wheels on the pavement. This lets the user make sure the vehicle is ready for real-world navigation and avoid costly mistakes. It also gives them a chance to practice and develop countermeasures against unintentional interference and malicious actors.”
Butler added that Safran is proud to support students who are helping to develop automated technology.
“Supporting Auburn’s Autonomous Vehicle team is an honor and a privilege. Student research represents the future of our industry,” Butler said. “We are proud to support them and see what they can accomplish with our simulation tools. We are confident that they will be able to gain valuable insights that will help them design, build and test their autonomous vehicles. It is our hope that their hard work will lead to the development of safe, efficient and affordable autonomous vehicles in the future.”
Accelerating mobility
Waymo, based in Mountain View, California, is an autonomous driving technology company. Formerly known as the Google self-driving car project, it was founded in 2009 and aimed to drive more than 10 uninterrupted 100-mile routes autonomously.
Its first fully autonomous ride on public roads took place in 2015, then Waymo became an independent self-driving technology company in 2016. It launched its first public trial of autonomous ride-hailing vehicles, called Waymo One, in Phoenix, Arizona in 2017, and has expanded its completely autonomous ride-hailing service trials to Scottsdale, Arizona, as well as San Francisco and Los Angeles.
The Waymo vehicle fleet also became fully electric this year.
360° Lidar, Radar, and cameras make up most of the technical elements of the fifth-generation Waymo fully autonomous vehicles. They also have redundant steering and braking, backup power systems, redundant inertial measurement systems for positioning, and more. (Image: Waymo)
Driving Change
According to its website, Waymo “represent[s] a diverse set of communities and interests, and we are coming together because we all share the belief that autonomous driving cars can save lives, improve independence, and create new mobility options.”
Some of Waymo’s community partners include Bike MS, the Arizona Council of the Blind, the Foundation for Senior Living, and Mothers Against Drunk Driving.
One community story to note is Waymo’s partnership with First Pace AZ — a supportive housing community for adults with autism, Down syndrome and other types of neurodiversity — to explore how Waymo could aid neurodiverse people.
Eli is a resident of First Place AZ and an adult with neurodiversity. He does not drive and relies heavily on ride-hailing services, carpooling, and the train to get to work and to volunteer. Not all public transportation is always available or accessible at certain hours. Additionally, human-driven rideshare and carpooling services can present bias from drivers and other passengers who do not understand the behavioral nuances of people who are neurodiverse.
To test the autonomous ride-hail Waymo One system, Eli and Natasha Grant, director of workplace and community inclusion at First Place AZ, hailed a ride to a local animal shelter.
After using the Waymo One service, Eli believed Waymo’s technology could help him stay connected to his community, wherever he may live in the future. Grant added that autonomous vehicles provide independence for individuals who may otherwise not be able to go to places to which they want and need to go.
Breaking social barriers
Community partners that fight food insecurity use Cruise’s autonomous vehicles to pick up left over food from businesses. (Image: Cruise)
Cruise is a self-driving car company based in San Francisco, California, and offers driverless rides in San Francisco; Austin, Texas; and Phoenix, Arizona. It was founded in 2013 by Kyle Vogt and acquired by General Motors in 2016.
Cruise first offered driverless ride-share services for its employees in 2017. In early 2020, the company began testing those driverless rides on public roads in San Francisco. Later that year, Cruise switched gears and repurposed a portion of its all-electric autonomous vehicle fleet to deliver meals to the community during the COVID-19 pandemic. It also began self-driving delivery trials in Arizona.
In 2021, Cruise announced plans for international driverless testing and expansion in Dubai and Japan. The next year, it opened its fully driverless service to public riders in San Francisco.
Delivering Hope
Cruise works with several community partners, such as the National Federation of the Blind, the SF-Marin Food Bank, and the San Francisco Giants.
“At Cruise, our commitment to social impact is a vital part of our business and an extension of our mission to improve life in our cities, especially for people underserved by transportation today,” the Cruise website stated.
In June, Cruise partnered with Replate — a nonprofit food rescue platform — to fight food insecurity and food waste in San Francisco and other communities. The partnership aims to use Cruise’s all-electric autonomous vehicle fleet, integrated with a national network of food recovery partnership from Replate, to pick up leftover food from local businesses and deliver it to organizations that help fight food insecurity.
The goal of the partnership is to create a sustainable cycle of food rescue that fights hunger and waste in local communities.
On Sept. 10, floodwaters overpowered dams and wiped out entire neighborhoods in eastern Libya, taking the lives of thousands of people and displacing more than 40,000 people, reported the Associated Press.
Maxar Technologies has responded by publicly releasing satellite imagery data that maps the affected areas to support emergency response efforts as a part of its Open Data Program.
The Maxar imagery or data distributed through the program can be quickly integrated into first responder workflows with organizations such as Team Rubicon, the Red Cross and other nonprofits.
Derna and other parts of eastern Libya were hit with extreme flash flooding the night of Sunday, Sept. 10 — an effect of the Mediterranean storm, Daniel.
The National Meteorological Center of Libya had issued early warnings for Daniel 72 hours before it occurred and notified all governmental authorities by e-mail and through media urging them to take preventive measures, reported the Associated Press.
Image: Navy Petty Officer 1st Class Devin M. Langer
The U.S. Department of Defense has called for thousands of UAVs to be built as a part of its Replicator initiative that aims to hasten military innovation to “leverage platforms that are small, smart, cheap and many,” said Deputy Defense Secretary Kathleen Hicks in a recent speech. This was cited in a Wall Street Journal editorial published on Sept. 13.
The United States plans to build thousands of UAVs over a 24-month period to counter China and the current military threat against U.S. forces in the Pacific Ocean. The UAV swarms could help the United States jam or distract enemy radars and surface-to-air missiles to stop China from pushing U.S. forces out of the Pacific.
The Wall Street Journal article stated that this idea by the Pentagon is not a real substitute for a bigger navy. While the Pentagon’s idea of UAV swarms for reconnaissance in the Pacific is technologically innovative, the article stated that the United States will still need technology breakthroughs and plentiful stocks of materials ranging from aircraft to munitions.
Furthermore, Deputy Hicks said that the Replicator initiative is not asking for new money in the next fiscal year budget, citing “not all problems need new money; we are problem-solvers, and we intend to self-solve,” reported the Wall Street Journal.
A new swarm of UAVs will give significant support to the U.S. military to counter China. However, the Pentagon’s quick plan for an unmanned technological “revolution” will need more investment to compensate for the failures that will inevitably accompany the new technology, the editorial argued, and to build “two Virginia-class submarines a year and fielding thousands of long-range weapons so U.S. forces don’t run out of their best firepower after a week in the Taiwan Strait.”.
Defense and Security Equipment International (DSEI) in London just wrapped up last week and industry news circulated many reports of various unmanned-related releases and opportunities during the show.
Drawing more than1,500 visitors annually, DSEI is an event at which representatives from governments, armed forces and industry leaders meet to advance the technology of weapons systems. With mostly armed or armored exhibits, the show is aimed at demonstrating to British forces and others coming from around the world, the various advances in weapons-related products and activities — with technological advances taking a primary position throughout the meeting and the exhibit hall.
Some unmanned exhibits/notes of interest
Drone Evolution promoted its UK-built Sentinel tethered UAV and MPU5 mesh radio system that puts a UAV-mounted radio/camera/thermal imaging system more than 150 ft above the ground for up to 6 hr or more — typically to support intelligence gathering, surveillance / reconnaissance, force protection and security. Sentinel is capable of running off of 12 v or 24 v power such as from a field vehicle battery without an inverter or generator, but also through main power, the company states.
Elistair France also launched its Orion 2.2 TE tethered UAV with a 2-in-1 propeller configuration change, which allows it to carry a heavier 5 kg payload. A recently integrated Nextvision Raptor with a 3 km laser rangefinder provides continuous imagery, target tracking, automated object categorization, automated scanning routines, and points of interest for military units, border guards, and national security agencies. Elistair claims its Orion UAV is capable of continuous operations for more than 50 hr over a 328 ft tether.
Robosys Automation and Landau Marine announced a collaboration to convert regular marine vehicles into autonomous unmanned surface vessels (USV). UK’s Robosys provided the Voyager artificial intelligence (AI) vessel system — an autonomy solution using AI combined with decision-aids. These new USVs are capable of surveillance, surveying, warfare, and patrolling duties — Voyager AI is claimed to be vessel-, propulsion-, and sensor-systems agnostic and retrofitting a crewed vessel can result in an autonomous craft operating at speeds of up to 45 kn. The system provides collision avoidance, anti-grounding, smart object avoidance, and autonomous operation during loss of communications.
Orion 2.2 TE – Standard props (left) and with heavy-lift props (right). (Image: Elistair)
Robosys Automation and Landau Marine announced a collaboration to convert regular marine vehicles into autonomous unmanned surface vessels (USV). UK’s Robosys provided the Voyager artificial intelligence (AI) vessel system — an autonomy solution using AI combined with decision-aids. These new USVs are capable of surveillance, surveying, warfare, and patrolling duties — Voyager AI is claimed to be vessel-, propulsion-, and sensor-systems agnostic and retrofitting a crewed vessel can result in an autonomous craft operating at speeds of up to 45 kn. The system provides collision avoidance, anti-grounding, smart object avoidance, and autonomous operation during loss of communications.
Landau Marine USV conversion (Image: Landau)
W Autonomous Systems (WAS)released news of the first landing of an autonomous UAVon the UK Royal Navy’s aircraft carrier Prince of Wales while at sea off Cornwall, England. The WAS HCMC UAV involved has two engines and a twin boom tail and can carry 220lbacross 620 mi and land within 500 ft — about half the length of the landing area on the Price of Wales aircraft carrier. For this trial, the UAV took off from a remote airfield at Royal Naval Air Station Culdrose and flew for 20 min to land autonomously on the deck of the HMS Prince of Wales aircraft carrier.The trials aimed to demonstrate that cargo UAVs are capable of relieving some of the re-supply tasks which are currently carried out by the ship’s helicopters.
BAE Systems and QinetiQ signed an agreement at DSEI to collaborate on autonomous uncrewed air systems (UAS) and mission management systems. Both companies are leading competitive UK aerospace companies, and it’s perhaps unusual to see them collaborating. Perhaps this indicates the degree of importance and complexity that this development investment signifies. The mission management system work will investigate compatibility between BAE Systems and QinetiQ ground-based mission software systems, and develop autonomous systems that enable operator/human decision-makers to combine the use of both manned and unmanned assets on the battlefield. The companies will continue to develop their own airborne vehicles independently but aligned with the intent to continue their collaborative concepts.
HMS Price of Wales leaving Portsmouth UK on its way to rendezvous for the HCMC UAV autonomous deck landing at sea (Image: UK Ministry of Defence)
In summary
This show is huge and this was only a small sample of the sort of unmanned and autonomous news found there this year — tethered UAVs, retrofitting surface vessels to become autonomous USVs, autonomous landings on the Royal Navy aircraft carrier Price of Wales and British industrial collaboration around UAVs.