Using a wide range of sensors and an ultra-broadband network created by team members, emergency services can orientate themselves and coordinate effectively even without GNSS, light or external communication.
In the NIKE MATE project, the focus is on navigating tunnels in difficult circumstances — collapse of infrastructure, GNSS outages, presence of smoke and debris, all of which make orientation challenging.
NIKE MATE is funded by the Austrian Research Promotion Agency (FFG), a research team consisting of Graz University of Technology (TU Graz), the University of Leoben, the Federal Ministry of Defence, OHB Austria and the Laabmayr Engineering Office.
The NIKE MATE team has developed a system for tough tunnel missions that combines sensor data from robots and rescue teams with a self-built UWB (ultra-wideband) network. The result is a dynamic map of the environment in which the team can locate and coordinate itself.
A human/robot team
The central innovation of the project is “teaming”. A robot with highly developed sensor technology first explores the surroundings and creates the dynamic map. The position information obtained is exchanged via a UWB transmitter with emergency personnel following behind or working in parallel, who are themselves equipped with UWB tags and who place UWB anchors along their route.
In addition to stable data transmission, the anchors also enable distance measurements between all participants even without a direct line of sight. This creates a network of distance measurements in which the positions of robots and people can be determined with an accuracy of closer than one meter.
“This precise localization is a decisive safety factor, for example if there is an open lift door or a precipice in front of a person,” said project manager Philipp Berglez, Institute of Geodesy, TU Graz.
Sensor technology plays an important role in localization. The robot uses a laser scanner, a camera, and wheel sensors to create a map of its surroundings. This means emergency services do not have to rely on plans that may be outdated or no longer correct due to damage.
The rescue workers who follow have inertial sensors (accelerometers and angular rate sensors) on their shoes. Using AI-based analysis, the system recognizes various movement patterns such as walking, crawling on all fours, or belly crawling.
Drone data to be included
To ensure that the position calculations are not only accurate but also reliable, the project team uses factor graph optimization methods. These originate from robotics and make it possible to take past measurements into account again, and thus better determine the current position. If robots or people pass the same place at different times, their data can be linked and the map continuously improved.
“The prototype we developed proved its suitability for use during our tests at Zentrum am Berg at the University of Leoben,” Berglez said. “For real-life use, we now need to make the individual components even more robust so that they can withstand real-life conditions and function reliably.
“We would also like to expand the system to include mini-drones in order to obtain additional data from a slightly higher position in the event of an emergency, which could significantly help emergency services in their work.”
Deepen AI has released its latest targetless calibration platform, built to simplify and accelerate calibration for complex autonomous vehicles, automotive ADAS and robotics sensor suites.
The platform supports a wide range of configurations including GNSS receives, multiple lidars, radars, cameras and inertial measurement units (IMUs). It processes all inputs in one pass using a single continuous dataset such as a ROS bag.
As sensor stacks become more sophisticated, traditional calibration methods are increasingly becoming a bottleneck in deploying autonomous systems at scale. These approaches are often manual, iterative and dependent on physical targets. Deepen AI’s solution introduces a fully automated and unified approach that calibrates all sensors simultaneously.
The platform estimates intrinsic, extrinsic and temporal parameters across the entire sensor suite in a single streamlined workflow, removing the need for sensor-by-sensor calibration. This approach streamlines operations while delivering high performance, achieving up to 0.05° angular accuracy and 0.7 cm positional accuracy, exceeding traditional target-based calibration techniques.
Capabilities include:
Simultaneous calibration across all sensors using a single dataset
Support for multi LiDAR, camera, radar, IMU, and GNSS configurations
Accuracy of up to 0.05° and 0.7 cm
No strict requirement for loop closure or fixed driving patterns
“Calibration has traditionally been one of the most time-consuming, complex and fragmented steps in deploying autonomous systems,” said Mohammad Musa, founder and CEO of Deepen AI. “With this release, teams can move to a system level approach that delivers both speed and precision using real-world data.”
The system is designed to work without controlled environments or rigid data collection protocols, allowing teams to seamlessly integrate calibration into existing workflows for both research and large-scale production deployments. It requires only simple and practical conditions, with calibration possible in locations such as parking lots, garages or quiet streets, provided the environment is mostly static with minimal moving objects. A minimum of 30 seconds of continuous driving data is required.
The platform is already being deployed with customers working on highly complex sensor configurations, where multiple lidars and cameras need to be calibrated together as a single system. In one such deployment, the full sensor stack was calibrated during a normal drive in a parking garage, parking lot, or a small residential street, without any special driving patterns or looped trajectories.
Using only a short duration of driving data, Deepen AI simultaneously performed intrinsic, extrinsic and temporal calibration across all sensors in a single workflow. This unified approach not only simplifies operations and improves consistency, but also delivers accuracy that surpasses traditional target-based calibration methods, making it well suited for both research and production environments.
Tactical air-lifters such as the Airbus A400M, Lockheed C-130 and Boeing C-17 require precise runway roughness assessments to operate safely on unpaved surfaces. An autonomous rover system developed at the Royal Military Academy of Belgium uses RTK/PPK GNSS positioning and sensor fusion to deliver centimeter-level height measurements, drastically reducing survey time. The system provides a practical solution for rapid runway certification across military operations and humanitarian response missions.
Unpaved runway assessment
The Airbus A400M Atlas, the Lockheed C-130 Hercules and the Boeing C-17 Globemaster III routinely operate from unpaved runways in harsh environments far from established infrastructure. Before these aircraft can safely land, flight crews require accurate runway roughness data to assess whether the surface meets operational limits. This assessment relies on precise, quantitative measurements of the runway’s surface characteristics — a task that traditionally requires specialized survey teams and hours of manual work with GNSS equipment, resources that are often unavailable in high-tempo tactical or emergency response scenarios.
The challenge is particularly acute because different aircraft have specific roughness tolerances. The A400M uses an equivalent bump height (EBH) methodology, while Boeing employs its Boeing Bump Criteria. The EBH requires vertical measurement precision of ±1 cm over wavelengths ranging from 5 to 100 meters. Meeting these stringent requirements with rapid, field-deployable methods has remained an operational gap — until now.
At the Royal Military Academy (RMA) of Belgium, we developed a novel solution to this critical challenge. Our system features a rugged, autonomous unmanned ground vehicle that can rapidly perform a centimeter-accurate runway assessment with minimal user intervention. It represents a fusion of robotics, geodesy, and advanced GNSS techniques, designed specifically for ease of use by military teams in the field. The system is called Belgian Navigational Surface Inspector (BENSI).
FIGURE 1 shows the BENSI system during a mission at a tactical landing zone with the A400Min the background. FIGURE 2 shows the BENSI system being configured by the operator during a landing preparation.
Figure 1 The autonomous UGV (BENSI) during a mission at a tactical landing zone with the A400M Atlas in the background.Figure 2 The BENSI system being configured by the operator during the beach landing preparation at Rømø, Denmark.
This article details the system’s architecture, the integration of multiple technologies that enable the stringent precision required achieved by GNSS and sensor fusion, self-driving capabilities and its successful deployment in demanding field tests. We present a military graded solution for ensuring tactical airlift safety, enabled by modern, accessible GNSS technology and robotics.
Quantifying runway roughness
Deployable Air Traffic Management (DATM) and Pathfinders are responsible for ensuring the safety of aircraft operations on unpaved runways. They are tasked with assessing the quality of the runway and the Runway Safety Area (RSA) to ensure that the aircraft can land safely. The pilots analyze their assessment and take the final decision to land.
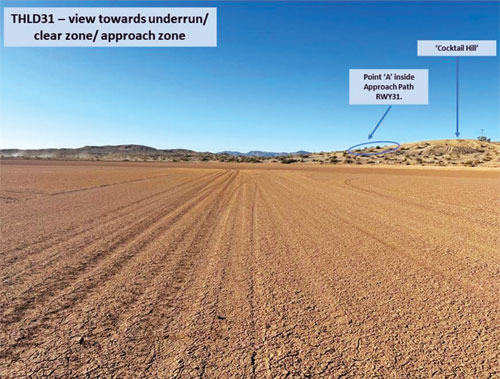
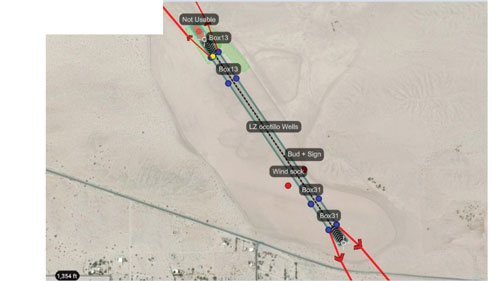
FIGURE 3 is an example of a landing zone having an unpaved runway that needs to be evaluated for landing. FIGURE 4 overviews the landing zone by mapping and indicating features of the runway that need to be considered by the pilots. An important aspect of the DATM’s assessment is the runway’s roughness, which is quantified by the EBH.
Figure 3 An example of a tactical landing zone.
For modern military transport aircraft operations, runway roughness assessment is a critical safety parameter. Both major manufacturers — Airbus with its EBH methodology and Boeing with its Boeing Bump Criteria — have developed sophisticated approaches to characterize runway longitudinal roughness profiles. These methods analyze height variations over wavelengths ranging from 5 to 100 meters, requiring vertical measurement precision of ±1 cm. This rigorous assessment is essential to reduce aircraft structural fatigue, minimize maintenance costs, prevent exceedance of design limit loads, and ultimately ensure safe operations. For the A400M specifically, Airbus requires EBH characterization to determine operational limitations of the aircraft’s maximum payload.
Figure 4 A typical mapping of a landing zone showing a condensed overview of DATM’s assessment.
Traditionally, achieving this precision would involve a painstaking survey conducted by specialists using a GNSS survey system mounted on a trolley requiring human guidance along the measurement tracks totaling more than 3 km of length. For military units like the DATM and Pathfinder teams, who often are the first on the ground, this is impractical. They need a system that is rapid, reliable, simple to operate without a surveying background, and robust enough for field conditions.
A GNSS-Centric design
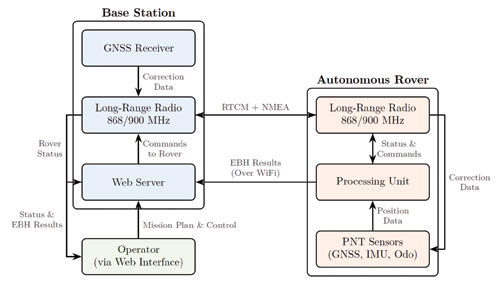
Our solution is a two-part system designed for rapid deployment: a portable GNSS base station and autonomous rover. FIGURE 5 shows a schematic overview of the system architecture.
Figure 5 A schematic overview of the system architecture, showing the data (NMEA) and correction (RTCM) flow between the base station, rover and operator.
The base station: The system’s anchor
Housed in a compact, portable case, weighing just 2 kg including tripod and radios (as seen in FIGURE 2), it serves as the operational hub. Once set up on its lightweight tripod, it performs an automatic survey to establish its precise coordinates. Its primary role for positioning is to generate and transmit Radio Technical Commission for Maritime Services (RTCM) 3.x correction data to the rover via a robust long-range radio link (operating in the868/900MHz bands).
Beyond its GNSS duties, the base station acts as a self-contained command center. It hosts a Wi-Fi hotspot and a web server, allowing the operator to connect with any standard tablet, smartphone or laptop. This web interface is used for mission planning, command and control of the rover, and real-time monitoring of survey progress. At the end of the mission, the operator can download the EBH data and additional quality metrics of the runway for analysis such as a summary report of the complete measurement, a gradient analysis, and a runway map highlighting zones with bumps or troughs exceeding the specified criteria.
An autonomous, all-terrain surveyor
The UGV is a lightweight but rugged platform chosen for its durability and open-source software architecture, which allows for deep integration of our custom navigation and control algorithms. The rover has been designed to be able to traverse rough terrain and survive in harsh weather conditions. The UGV consists of two parts, the chassis (11 kg) and the processing payload(8 kg). The heart of the rover is the processing payload, which contains a sophisticated sensor suite designed for high-precision localization and navigation.
■ Primary GNSS receiver. A high-grade, multi-constellation Septentrio receiver with a Calian/Tallysman GNSS antenna provides the main source of positioning information.
■ GNSS heading. A second Calian/Tallysman GNSS antenna, set up in a moving-base configuration, provides degree-accurate true heading, which is critical for maintaining precise track-following.
■ Inertial measurement unit (IMU). An industrial-grade Xsens IMU provides high-frequency data on the rover’s orientation and acceleration, bridging any brief GNSS outages, providing the sensor fusion algorithm with high-rate data, and helping to smooth the final trajectory.
■ Radio communication. The radio modules provide robust long-range communication with the base station operating in the 868/900MHz bands.
■ Wheel odometry. Encoders on the rover’s wheels provide continuous velocity information, acting as a crucial input for the sensor fusion algorithm. All sensor data is fed into an onboard mini-PC running the Robot Operating System, a flexible framework for developing robotic applications.
Path to precision
Achieving centimeter-level accuracy on a moving platform in challenging environments requires more than just a good GNSS receiver. Our approach is built on a robust foundation of sensor fusion and a dual processing strategy using real-time kinematic and post-processing kinematic (RTK/PPK). An extended Kalman filter (EKF) is at the core of the rover’s navigation software. The EKF continuously fuses data from the GNSS receivers, IMU and wheel encoders to produce a single, high-integrity “pose” (position and orientation) estimate.
For runway surveying, we employ two modes of GNSS processing:
RTK. During the mission, the rover uses the RTCM corrections from the base station to compute a centimeter-accurate position in real-time. This is used for autonomous navigation, allowing the rover to follow its generated mission plan configured by the operator with high precision.
PPK. While RTK provides excellent real-time results, the most demanding applications benefit from post-processing. Both the rover and the base station log all raw GNSS observables during the mission. After the survey is complete, these raw data files are processed together which allows for more rigorous quality control and can often resolve ambiguities or fix cycle slips that were not solvable in real-time, providing the definitive, highest accuracy trajectory for the EBH analysis.
A final crucial step is extracting the height profile for each EBH track and subsequently transforming and reformatting this data for Airbus’ AssurTool. The step also is automated and carried out by the software. It takes care of the following:
■ The conversion of the geodetic coordinates (latitude, longitude, and height above the World Geodetic System 1984 [WGS84] ellipsoid) to Universal Transverse Mercator plane coordinates and orthometric heights (heights relative to a geoid).
■ The extraction of the height profile of each EBH track.
■ Quality control of the precision of the height profile flags tracks that do not meet the required accuracy or show inconsistencies.
■ The transformation and reformatting of this data for Airbus’ AssurTool.
Self-driving capabilities
The rover uses a navigation framework with a custom planner for generating smooth, curved paths that match the rover’s turning capabilities and steers the rover using a controller based on the Regulated Pure Pursuit tracking algorithm. A specialized lane-generation algorithm creates optimal survey patterns from runway corner points, with behavior-tree recovery strategies for robust operation.
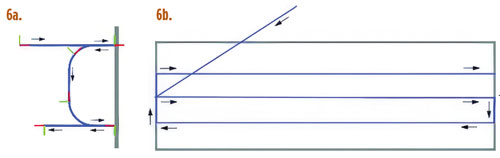
FIGURE 6 shows a typical EBH survey pattern generated from the mission plan and executed by the rover and a depiction of how the rover plans the smooth curved path between the lanes.
Figure 6 Features of the navigation framework used for planning the EBH tracks. (a) A typical EBH survey pattern generated from the mission plan and executed by the rover. (b) A depiction of how the rover plans the smooth curved path between the lanes.
A streamlined workflow
The system was designed from the ground up to be operated by non-surveyors. A typical mission workflow is as follows:
Setup. The operator places the base station on a tripod near the runway and unfolds the rover. The entire hardware setup takes less than 10 minutes.
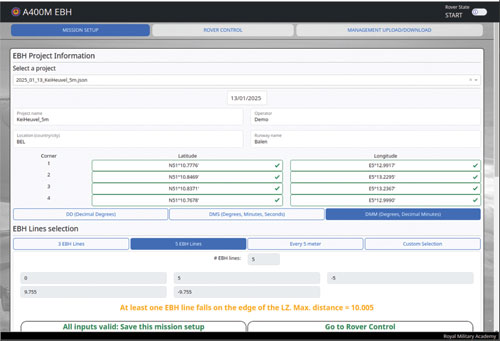
Mission planning. Using a ruggedized tablet (or any other device with a web browser), the operator connects to the base station’s WiFi and opens the web interface. They define the runway by entering the coordinates of the runway’s corners. The software automatically calculates the EBH lines based on the required spacing. FIGURE 7a shows the user interface displayed on a tablet, showing the EBH mission configuration page.
Figure 7a The user interface displayed on a tablet, showing the EBH mission configuration.
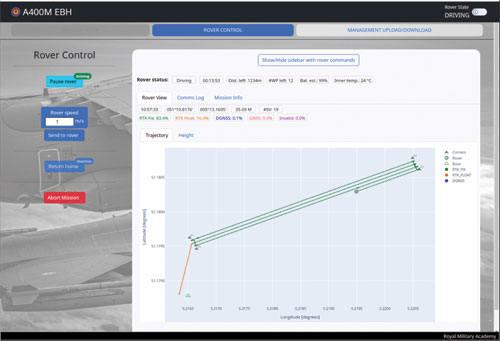
Execution. The operator initiates the mission, and the UGV autonomously navigates to the start of the first line and begins the survey. The operator can monitor and control the rover’s progress, position, and GNSS quality status in real-time on the web interface. FIGURE 7b shows the user interface displayed on a tablet, showing the rover control, the real-time status of the UGV and the measurements.
Figure 7b The tablet showing the rover control and the real-time status of the UGV and the EBH results.
Data retrieval. Upon completion, the rover returns to the base station. The system automatically processes the data, producing downloadable files formatted for direct import into Airbus’ AssurTool and additional useful quality metrics for the operator. These consist of a summary report of the complete measurement, a gradient analysis, and a runway map highlighting zones with bumps or troughs exceeding the specified criteria.
Analyzing the data
Once the rover completes its survey and returns to the base station, the system automatically initiates post-processing of the collected data. This critical step validates the quality of every measurement and generates operator-ready outputs for both Airbus’ AssurTool and field assessment.
The post-processing pipeline applies rigorous quality criteria to each survey line. Lines failing these criteria are automatically flagged with detailed diagnostics explaining the cause.
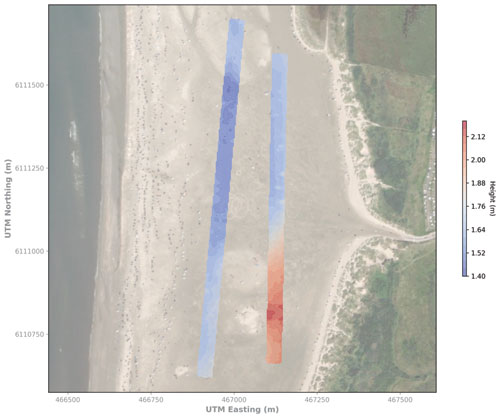
For operational decision-making, the system generates a comprehensive visualization report. The operators receive planimetric maps showing the height profile plots and a detailed gradient analysis identifying critical slope transitions. A key capability is the generation of a 3D interpolated height map of the entire runway surface. This color-coded surface map provides an intuitive view of the runway’s topography, clearly highlighting zones with excessive bumps, depressions, or gradient anomalies that facilitates the assessment of the runway.
These analysis reports are accessible through the web interface for immediate download to the operator’s tablet. FIGURES 8 shows examples of the visualization report.
Figure 8a 2D height and gradient contour maps of two surfaces generated by the BENSI system. (a) A height contour map of two landing zone (LZ) surfaces automatically generated by the BENSI system. Figure 8b A gradient contour map of two LZ surfaces automatically generated by the BENSI system.
Proven performance
The UGV system is a mature prototype that has been validated in numerous international military exercises. It has successfully surveyed tactical landing zones in varied environments, from the desert strips of Yuma, Arizona, and 29 Palms, California, to the sandy shores of Denmark and fields in France, Portugal and Italy. In all tests, the system has consistently delivered the sub-centimeter height precision required for A400M EBH certification.
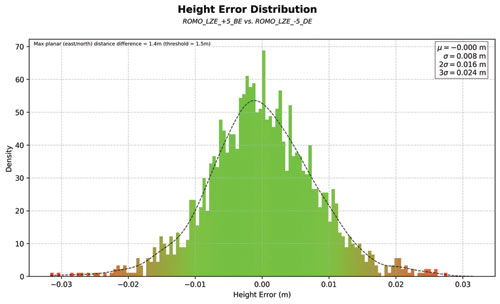
2025 Rømø Head-to-Head Trial.During beach-landing preparations in August 2025, our autonomous rover and a manual system (human-guided trolley) using a professional GNSS survey system ran side-by-side on a 1 000m landing zone on the Rømø beach in Denmark. The BENSI solution matched the manual survey system height profile with a standard deviation of 8mm and demonstrated significantly better lane-tracking consistency (mean deviation: 8,5 cm vs 16 cm and deviation error: 3 cm vs 9 cm). FIGURE 9 shows the height-error distribution between the BENSI system and the manual survey system at Rømø, Denmark.
Figure 9 Height-error distribution between the BENSI system and the manual survey system at Rømø, Denmark.
Rapid humanitarian response
While BENSI was conceived for tactical airlift operations, its capabilities extend naturally to humanitarian assistance and disaster-relief missions. Belgium’s civil rapid-response unit Belgian First Aid & Support Team (B-FAST) routinely deploys doctors, paramedics, firefighters, and other professionals worldwide following earthquakes, floods, or epidemics. Leveraging the A400M’s ability to land on short, unpaved strips away from congested or contested airfields drastically cuts transit times — but only if the runway’s condition can be certified quickly.
The BENSI systems enables a DATM team to quickly relay an EBH report and awareness map of the immediate area to the inbound aircrew. This rapid assessment unlocks critical early access for life-saving medical supplies and personnel when every hour counts.
Conclusion and the Road Ahead
The fusion of autonomous robotics and high-precision GNSS offers a powerful solution to the critical challenge of certifying unpaved runways. Our system saves valuable time, reduces the burden on specialized personnel, and provides objective, high-quality data that directly enhances the safety of tactical airlift operations.
Development is ongoing. Our current efforts focus on several key areas:
■ Improving navigation in degraded environments. We are exploring tighter coupling between the GNSS and IMU to provide more robust navigation through areas of poor satellite visibility.
■ RSA assessment. We are experimenting with integrating a lidar sensor to generate a 3D point cloud of the runway and its surroundings. This will automate obstacle detection and the assessment of the RSA, though we are carefully working to mitigate potential electromagnetic interference from the lidar that can interfere with GNSS reception.
■ Handheld corner point device. To further improve absolute accuracy, we are developing a small, handheld device that uses RTK corrections from the base station, allowing operators to mark the runway corners with centimeter-level precision.
This project demonstrates a clear application of GNSS technology in a demanding military aviation context, with broader implications for any field requiring rapid and precise surface profiling, from civil engineering to disaster response.
Development Team
■ Pieterjan De Meulemeester ([email protected]) is a Ph.D. research engineer at the RMA of Belgium.
■ Alain Muls ([email protected]) is professor at the RMA of Belgium. He teaches the courses Military Satellite Based Positioning andMilitary Geodesy.
■ Jarno Van Audenhoven ([email protected]) is a Robotics Development and Research Engineer at the RMA of Belgium.
■ Pascal De Kimpe is a technician at the RMA of Belgium.
■ The BENSI system was developed by the R&D team at the RMA of Belgium in collaboration with Belgian Defense. The system has been successfully field-tested during international military exercises and is being evaluated for operational deployment.
All photos courtesy of BENSI Development Team of the Royal Military Academy of Belgium
BDStar Navigation subsidiary TruePoint has introduced the TruePoint.CM network real-time kinematic (NRTK) service across Europe, the latest in BDStar’s expansion into international high-precision positioning markets.
Supporting all major GNSS and QZSS, the service is designed to improve signal reliability in complex European environments. TruePoint.CM is built on the company’s chip-cloud integration architecture and works with both BDStar’s Unicore and third-party GNSS hardware through standards-based interfaces.
The service provides wide-area coverage throughout Europe, the company said, offering centimeter-level accuracy with fast convergence times. Before launch, TruePoint conducted extensive validation testing in more than 40 cities across 12 European countries, including more than 300,000 kilometres of dynamic field trials.
The platform uses an adaptive data protocol to reduce bandwidth consumption by up to 70% while maintaining full positioning accuracy, a feature aimed at helping customers reduce operational data costs. Remote diagnostics and over-the-air firmware updates are incorporated to support more efficient device management in the field.
TruePoint.CM operates on a fully redundant cloud infrastructure spanning data sources, data centers and service-delivery interfaces. The system is designed to ensure continuous uptime, backed by a stated service availability of 99.9%.
At launch, the company reported that it has already secured commercial adoption in the European robotic lawn mower market, with additional opportunities expected in autonomous robotics, UAVs, precision agriculture, automotive and consumer IoT.
Swift Navigation and SimCom are partnering to deliver centimeter-level GNSS accuracy to high-volume robotics applications worldwide. The collaboration integrates Swift’s Skylark precise positioning service with SIMCom’s high-performance SIM66MD and SIM66D GNSS modules.
This combination allows manufacturers and developers using these modules to activate centimeter-accurate satellite positioning, dramatically improving the performance, safety and reliability of robotic lawnmowers, delivery robots, agricultural vehicles, and other autonomous systems. SIMCom’s GNSS modules have compact designs, low power consumption, and wide array of interfaces, making them suitable for seamless integration into diverse IoT and autonomous devices.
Swift’s Skylark Nx RTK, the highest precision variant of Skylark, leverages a proprietary atmospheric model to deliver continuous 1-2 cm accuracy across vast geographic areas, including all of Western Europe. The carrier-grade network eliminates the need for developers to manage base stations or switch between multiple correction providers, simplifying deployment of high-precision outdoor robots at scale.
Key benefits for autonomous navigation:
Autonomous Operation. Centimeter-level accuracy is essential for robots to execute complex tasks, such as following precise mowing patterns, planting seeds with exact spacing, or navigating narrow construction sites.
Safety and Geofencing. Precise localization enables reliable enforcement of virtual boundaries (geofencing), preventing robots from entering restricted zones or colliding with obstacles, which is critical for safety in public or shared spaces.
Improved Efficiency. Reliable 1-2 cm precision reduces path errors, minimizes overlap in coverage (e.g., in farming or lawn care), and ensures the robot consistently reaches its exact target destination, maximizing battery life and operational uptime.
Customers purchasing SIMCom’s SIM66MD and SIM66D modules now receive a six-month free trial of Skylark Nx RTK.
BDStar Navigation Co. Ltd., a provider of positioning technology solutions, has announced its chip-coud integration strategy and introduced intelligent location digital base (iLDB) in Frankfurt, Germany.
iLDB leverages a distributed chip-cloud architecture to create a unified technology and service system. Guided by the chip-cloud Integration paradigm, it combines focused R&D with cross-technology synthesis. This approach delivers robust positioning solutions and powers the integration of physical and virtual environments.
By establishing the iLDB, BDStar has created a closed-loop ecosystem for its positioning products and services, encompassing algorithms, chips/modules, antennas and data services within a unified framework. The company’s solutions deliver on-demand positioning that is all-weather, all-scenario, secure, reliable and intelligently adaptive, serving a wide range of sectors, including intelligent driving, outdoor robotics (such as robotic lawn mowers), unmanned aerial vehicles, and smart wearables across industrial, automotive and consumer markets.
Positioning for Europe. Aligned with the iLDB strategy, BDStar also introduced its new high-precision positioning data service for the European market. Built on network real-time kinematic (NRTK) technology, the service offers broad coverage across Europe and provides customers throughout the region with centimeter-level, real-time positioning accuracy within seconds.
Founded in 2000, BDStar ranks among the world’s top ten suppliers of GNSS core components. In 2025, the company’s global GNSS chip/module shipments are expected to exceed 100 million units. Many leading international brands are already integrating BDStar’s GNSS chips, antennas, and data services into next-generation products designed to address changing market demands.
David Zhou, vice president of BDStar, said the company’s chip-cloud integration strategy delivers multiple benefits through one-stop design, supply and support, enabling reduced cost, enhanced efficiency, assured security, single accountability, and rapid, effective troubleshooting.
Ruxin Zhou, founder and chairman of BDStar, emphasized the company’s global vision. “With our chip-cloud integrated model, BDStar will strengthen worldwide partnerships and continue building a world-class, globally covered iLDB,” he said. “We are committed to creating long-term value for our customers and driving progress in the intelligent era.”
Septentrio, part of Hexagon, has started volume shipments of its mosaic-G5 modules. Measuring 23 mm by 16 mm and weighing 2.2 g, mosaic-G5 enables reliable positioning without performance compromises for commercial UAVs, robots, geographical information system devices (GIS) and many other size and power-constrained industrial applications. The company’s GNSS technology provides enhanced positioning availability in challenging environments where signals are degraded or obstructed.
“We have had a lot of interest in the mosaic-G5 module series since its announcement earlier this year. After successful beta testing with various customers, I am pleased to say that we have now started shipping volume orders,” commented François Freulon, director of product management at Septentrio.
The mosaic family offers users a range of receiver modules to balance performance and cost. The quad-band mosaic-G5 P3 and the triple-band heading module mosaic-G5 P3H provide positioning availability in challenging environments for applications such as mapping or light show UAVs. The modules complement the mosaic product line, including the mosaic-X5 receiver, which the company positions as a benchmark for GNSS open-signal anti-jamming and anti-spoofing² resilience in a small form factor.
The mosaic-go G5 evaluation kit is available through the Septentrio webshop for testing and prototyping. It offers direct autopilot connections, and the free RxTools user interface assists with setup and evaluation.
Septentrio will showcase the mosaic-G5 modules at Intergeo in Frankfurt, Germany, Oct. 7-9, in Hall 12, Booth 114.
Hi-Target, a Chinese high-precision positioning enterprise and manufacturer of high-end GNSS equipment, and GMV, a global technology group specializing in advanced navigation solutions, have established a strategic alliance to jointly develop integrated differential service solutions.
Through this partnership, Hi-Target and GMV support a wide range of automation-driven positioning applications — ADAS, robotics, UAVs, precision agriculture, smart infrastructure and intelligent mobility systems.
As industries progressively adopt automated technologies, precise and reliable positioning has become a foundational requirement across application domains. From today’s L2 and L2+ driver assistance systems (ADAS) in vehicles to autonomous UAV operations, robotic platforms, and the emerging needs of Level 3+ mobility solutions, the demand for scalable and high-accuracy positioning continues to grow.
The strategic alliance between the two companies leverages Hi-Target’s strengths in high-precision satellite navigation and user-grade GNSS systems, along with GMV’s extensive global expertise in precise navigation algorithms and satellite-based augmentation services. The result will be a high-availability, low-latency positioning service with global reach.
By combining their complementary technologies, including user-grade GNSS hardware, correction services, and augmentation infrastructure, Hi-Target and GMV will facilitate the adoption of high-precision positioning across various industries and geographic regions.
Their collaboration will support system integrators, OEMs, and solution providers in accelerating the development and deployment of automation in sectors with increasing levels of autonomy.
Advances in GNSS technology constantly expand the range of projects that benefit from them.
ComNav Technology
A telecom company adopted its CORS station to build China’s national CORS service for public companies. It is increasingly used for field robotics, including the development of self-driving cars.
Leica Geosystems
Bernhard Richter, vice president of Geomatics, Leica Geosystems AG, pointed to one of the biggest infrastructure projects in Europe, which aims to connect London to Birmingham, Manchester and Leeds with a high-speed railway system, avoiding the need to fly between those cities. This will have great environmental benefits because high-speed trains are much more efficient than planes.
However, high-speed rail requires tremendous precision. “First comes the prep work, moving dirt,” said Richter. “Then you must install the railroad ties with tenths of a millimeter precision relative to each other to avoid side accelerations. For a surveyor, it really has everything in one project. You need to constantly work with civil engineers. You then try to build as much as possible with machine-control-guided systems to make the leveling as automated as possible.” The project will include building bridges over whole valleys and monitoring them, particularly during the construction phase, to ensure that they are not moving.
“Even the factory they are building is huge, so just to build the factory you need a lot of surveying,” Richter said. The project is generating 25,000 jobs at 300 construction sites, all of which must be managed on very tight schedules. In this context, the quality of the survey gear is critical. “On a construction site, the surveyor should be an invisible person,” Richter said. “When they come with the big machines and want to get stuff done, they don’t want a surveyor on the site. So, he has to work off hours, then remain on alert and trust that what comes out of an instrument is correct.” Leica Geosystems is one of the main suppliers for this project. “They chose us because of our focus on reliability, trust and quality.”
Trimble
Software is increasingly driving sales, pointed out Boris Skopljak, vice president, Surveying & Mapping Strategy and Product Marketing at Trimble Inc. As an example, he cited Trimble’s SX12 scanning total station, which uses Trimble Access software to leverage scanning, imaging and traditional total station capabilities in the field. “We have provided more inspection tools to enable people to decide whether something is meeting the tolerance.” The Trimble Connect cloud-based collaboration platform, coupled with the continuous field and office connectivity, has driven productivity increases and moved customers toward choosing the company’s solutions, he said.
As an example of Trimble solutions, Skopljak cited City Rail Link, New Zealand’s first underground rail network and the largest transportation infrastructure project ever undertaken there. “The Trimble R10 was integral to acquiring static observations above the work site, while the Trimble S9, DiNi and Trimble Business Center network adjustment were game changers for the survey control network,” he said. To expedite mine tunneling the surveyors used the SX12’s combined total station and scanning functionality with Trimble Access field software infield inspection tools. “Fewer customers are choosing solutions on a spec. It’s not about how many satellites you can track, for how many days, or how many points you can scan. They are choosing solutions based on the ecosystem and productivity.”
The mosaic-X5 and mosaic-H modules are being integrated into ArduSimple’s new evaluation kits, making resilient cm-level positioning easily accessible for testing and prototyping
With these new kits, ArduSimple brings to market triple-band real-time kinematic (RTK) GPS/GNSS as a plug-and-play solution for the most popular development platforms such as Arduino, STM Nucleo, Raspberry Pi, Ardupilot and Nvidia Jetson.
ArduSimple enables developers of robotics, UAVs and autonomous systems to easily try out mosaic, a unique module offering the latest high-performance GNSS positioning technology.
“The mosaic module complements the ArduSimple RTK product portfolio with a higher-end solution for the most demanding applications,” said Marc Castillo, senior consultant at ArduSimple. “Triple-band GNSS brings extra reliability to the RTK solution and removes the headache of transitioning from L2 to L5 band. This, combined with its feature-rich software, will allow our customers to accelerate even more their time-to-market.”
In addition to triple-band GNSS, mosaic module offers unmatched resilience to radio interference. This is especially important in robotic devices where electronic components, such as cameras and servos, are located close to the GPS/GNSS receiver, often interfering with GPS signals, which are weak, and causing positioning degradation. High-accuracy positioning is delivered at a uniquely high update-rate by mosaic-X5 in single antenna mode. Meanwhile, the board which mounts mosaic-H offers all-in functionality with dual-antenna mode for accurate GNSS heading.
“By partnering with ArduSimple we are bringing mosaic to emerging markets where its outstanding performance makes a difference. Mosaic makes accurate positioning so much easier to integrate and use, while giving a competitive edge to new products,” said Gustavo Lopez, market access manager at Septentrio. “ArduSimple is a great partner because they are known in the industry for offering user-friendly and affordable evaluation kits for RTK positioning, complemented by software tools, making integration and rapid prototyping easy.”
The SimpleRTK3B board, which allows evaluation of the mosaic GNSS module, is now available for purchase via the ArduSimple web shop. For more information about mosaic or other Septentrio products visit septentrio.com or contact Septentrio.
Velodyne Lidar will display its lidar sensors and software at the IAA Mobility trade show, which takes place Sep. 7-12 in Munich.
Showcased are:
Velarray H800, a solid-state lidar sensor architected for automotive grade performance. With combined long-range perception and a broad field of view, the sensor is designed for safe navigation and collision avoidance in ADAS and autonomous mobility applications.
Velarray M1600, a solid-state lidar sensor designed to serve mobile robotic applications, enables touchless mobile and last-mile delivery robots to operate autonomously and safely, without human intervention.
Velabit, Velodyne’s smallest sensor, designed for versatility and affordability to 3D lidar perception.
Velodyne Lidar’s Intelligent Infrastructure Solution addresses the pressing need for smart city systems that can help improve road safety and prevent traffic accidents. The solution creates a real-time 3D map of roads and intersections, providing precise traffic monitoring and analytics that is not possible with other types of sensors like cameras or radar.
Partners Using Velodyne
NI, developer of automated test and automated measurement systems, is co-exhibiting at the Velodyne booth. NI is showing simulations optimized for Velodyne’s lidar sensors that can be used in developing and testing advanced driver assistance systems (ADAS) and autonomous vehicle (AV) capabilities.
NI will demonstrate how its monoDrive AV simulation software is using Velodyne’s lidar technology to create digital twins and is providing validated physics-based sensor models for Velodyne lidar sensors.
Seoul Robotics, an Automated with Velodyne partner, is demonstrating at the Velodyne booth its AI perception engine for Velodyne’s lidar sensors. The engine provides real-time object detection, classification, tracking and prediction for autonomous systems.
The AI engine can power self-driving cars as well as smart-city applications and advanced parameter monitoring systems for facilities. Seoul Robotics’ SENSR perception software includes an AI engine that is fully optimized to utilize Velodyne’s portfolio of lidar sensors, including the Puck, Ultra Puck and Alpha Prime.
The Association for Unmanned Vehicles Systems International (AUVSI) brings its annual conference, XPONENTIAL, to Atlanta, Aug. 16-19. The event invites industry changemakers and end users to experience new technology that is solving real world problems, from safety and defense, to energy and infrastructure, business, construction, health, and the environment. The convention features keynote speakers, panel presentations, educational programs, specialized workshops, networking opportunities, and an exhibitor hall featuring newly developed technology to preview.
“To support our community and these technologies as they continue to accelerate along the innovation curve, our theme this year is Assured Autonomy,” said Brian Wynne, President and CEO of AUVSI. “As an industry, we must work together to ensure these systems are created, deployed, marketed and regulated to create a virtuous cycle of trust, social benefit, and economic growth. You’ll see that focus throughout our programming on-site, as well as in the technologies and operational services on display from our exhibitors.”
XPONENTIAL typically attracts 8,000+ attendees each year, who attend 100+ educational sessions organized by tracks focused around technology, policy, and public acceptance. The Solutions Theatre features the top experts in their field sharing best practices, technical discoveries and announces the AUVSI XCELLENCE Award winners. The Startup XCELERATOR Pavillion serves as a hub for emerging technologies and early-stage companies providing a glimpse into the industry’s future. Meanwhile, the XPO Hall provides access to more than 450+ companies all showcasing the latest breakthroughs in drones, robotics, and other unmanned systems.