Abracon has introduced a new series of GNSS RF antennas designed to elevate location-based services with enhanced accuracy and precision. This new lineup aims to outperform conventional GPS technologies by offering faster signal acquisition, improved tracking capabilities and reduced power consumption.
The antennas support a full spectrum of bands, including L1, L2, L5, and L-band data correction services. It can be used in a variety of sectors — such as agriculture, surveying, the Internet of Things (IoT), mapping, defense and aviation.
The technology is designed to meet the rigorous demands for precise location data across various applications. These antennas offer multi-band and multi-constellation support to ensure broad compatibility. With centimeter-level accuracy, these antennas are crucial for aerospace, defense, asset tracking, geolocation, precision agriculture and industrial IoT.
The civil infrastructures behind safety-critical applications in aviation, maritime and terrestrial navigation rely heavily on global navigation satellite system (GNSS) signals. The civil GNSS signal structures are vulnerable to spoofing attacks, which can endanger public safety.
In this work, the authors introduced an optimal cumulative position-domain innovation (CPI) monitor to detect spoofing by accumulating tracking errors embedded in the spoofer’s signal. The authors also derived relationships between missed detection probability, tracking error magnitude and monitor run time to show that even with decimeter-level tracking error, the monitor can detect spoofing with a low probability of missed detection in less than 1 minute.
The team of researchers evaluated the performance of the CPI monitor for both white and time-correlated (colored) tracking errors. To compute protection levels and detect short-duration spoofing, researchers proposed a complementary solution separation (SS) monitor to implement in sequential, overlapping windows to compare the integrated INS/GNSS position solution against an inertial navigation system (INS) coasting solution. The INS-only coasting element allows the system to maintain positioning continuity after detection, albeit at lower accuracy, as the INS drifts.
The experimental results indicate that implementing a CPI monitor can dismiss the conjecture that INS-based spoofing detection is susceptible to slowly deviating counterfeit signals. It was found that if the duration of the spoofing event exceeds a minimum time defined by the variance and time constant of the tracking error, the spoofer’s target tracking error can be detected.
Birendra Kujur, Samer Khanafseh and Boris Pervan; “Optimal INS Monitor for GNSS Spoofer Tracking Error Detection.”
Space-Time Adaptive Processing
Antenna arrays and spatial processing techniques are among the most effective countermeasures against GNSS signal interference. In this paper, the authors propose a new array concept, space-time adaptive processing (STAP), that consists of spatially distributed subarrays small enough to fit inside the non-metallic parts of an automobile. The device is designed to be installed in bumpers or side mirrors.
During the experimental testing, the authors used beamforming algorithms for the array to perform against jammers in the GPS L5 and Galileo E5a bands. The authors composed a GNSS jamming scenario to compare conventional space adaptive processing (SAP) methods and the new STAP method using real-life measurements in a dynamic scenario. In this simulation, the car was rotated 360° throughout the complete measurement. The comparison between the received signal quality demonstrated an improvement for wideband signals.
The results demonstrate that the performance of the STAP was dependent on the number of taps analyzed in the testing simulation that included different fractional delays. Overall, the research showed STAP could outperform SAP implementation in applications requiring robust tracking, as it was able to process all satellites for an additional 12 seconds.
Marius Brachvogel, Michael Niestroj, Michael Meurer, Syed N. Hasnain, Ralf Stephan and Matthias A. Hein; “Space-Time Adaptive Processing as a Solution for Mitigating Interference Using Spatially-Distributed Antenna Arrays.”
Enabling RTK Positioning Under Jamming
New GNSS applications demand high position accuracy and resilience against radio frequency interference. Separately, these demands can be fulfilled by multi-antenna systems using spatial filtering and carrier-phase positioning algorithms, such as real-time kinematics (RTK), respectively. However, combining these approaches creates a severe issue: the spatial filtering induces a phase offset into the measured carrier phase leading to a loss of position accuracy.
This paper presents a new approach to compensate for the phase offset without knowing the antenna array radiation pattern or the direction of arrival of the signals. The proposed algorithm was tested in two different scenarios using an in-house software receiver in combination with the RTKlib — an open-source program package for GNSS positioning — that was used to estimate an RTK solution. In the first scenario, the signal power of a jammer from a constant direction of arrival (DoA) was raised stepwise. In the second scenario, a jammer with constant signal power was moved around the receiver antenna array. For both scenarios, the proposed algorithm was compared with a multi-antenna system not compensating for the phase bias and with a single antenna processing.
It is most suitable in situations where a medium-to-high precision (dm to cm) solution must be resilient to interference. A very high precision solution (cm to mm), comparable with a geodetic receiver accounting for antenna phase center variations, cannot be achieved with this algorithm.
In this paper, the signal recording and processing time was limited to less than half an hour. The carrier-phase offset produced by the proposed algorithm may become larger over longer observation times. Evaluating this is part of future work.
Tobias Bamberg, Andriy Konovaltsev and Michael Meurer; “Enabling RTK Positioning Under Jamming: Mitigation of Carrier-Phase Distortions Induced by Blind Spatial Filtering.”
Several layers of defense can be implemented in a GNSS receiver to improve its performance in the presence of interference. These layers include the use of pre-correlation mitigation techniques, post-correlation quality indicators to screen measurements and fault detection and exclusion (FDE) at the position solution level.
This paper provides a characterization of the interactions between these layers of interference mitigation and a measurement quality check. Data collected in the presence of increasing levels of jamming were processed using different interference mitigation techniques, including robust interference mitigation (RIM) and the adaptive notch filter (ANF). A software-defined radio (SDR) approach was used, and measurements were generated by considering five interference-mitigation techniques. Position solutions were then computed using a forward-backward approach for receiver autonomous integrity monitoring (RAIM). Signals from GPS, Galileo and BeiDou were processed and both single and dual-constellation solutions were analyzed.
The results demonstrated that interference mitigation allowed the receiver to track a larger number of signals even in the presence of high levels of jamming power. This increased measurement availability was then effectively exploited by RAIM techniques to provide more reliable solutions. Measurements from several constellations further improved the reliable availability of the position solutions.
Ciro Gioia and Daniele Borio; “Multi-layered Multi-Constellation Global Navigation Satellite System Interference Mitigation.”
OxTS’ GNSS-aided inertial navigation systems (INS) are now supported on the NVIDIA DRIVE autonomous vehicle (AV) development platform. The software plug-in, developed in-house by OxTS using the NVIDIA DriveWorks SDK, runs on the NVIDIA DRIVE AGX Orin developer kit.
The plug-in gives developers using NVIDIA DRIVE the ability to feed OxTS GNSS/INS data directly into the platform to access accurate reference localization data as ground truth and validate the performance of the other sensors or algorithms under test.
A GNSS/INS is only one of several sensors required for an AV to operate. These sensors create a vast amount of data that must be synchronized, calibrated and centrally processed for the vehicle to operate safely. The OxTS GNSS/INS offers precision time protocol (PTP) time synchronization and can serve as the reference to calibrate all the other sensor data back for data analysis.
The OxTS RT3000 series is the GNSS/INS device supported on the NVIDIA DRIVE platform. It is currently being used as an advanced driver assistance system (ADAS) and vehicle dynamics ground-truth reference system for automotive test and validation teams across the globe.
The NVIDIA DRIVE platform is built on the DRIVE Orin system-on-a-chip and can process up to 254 trillion operations per second (TOPS) of sensor data from a variety of camera, lidar and radar devices.
Leica Geosystems, part of Hexagon, has introduced the Leica TerrainMapper-3 airborne lidar sensor. It features new scan pattern reconfigurability to support a variety of applications and requirements in a single system.
The system offers three scan patterns, which allow users to customize the sensor’s performance to fit specific applications. Its circle scan patterns are designed to improve 3D modeling of urban areas or steep terrains. The ellipse scan patterns use data capture for more traditional mapping applications. Skew ellipse scan patterns are aimed at improving point density for infrastructures and corridor mapping applications.
The sensor has a high scan speed rate and a 60° adjustable field of view to maximize data collection with fewer flight lines. The TerrainMapper-3 is complemented by the Leica MFC150 4-band camera, which operates with the same 60° field of view coverage as the lidar for exact data consistency.
The device’s reduced beam divergence offers more accurate results, while its new multiple pulses in air (MPiA) handling is designed to deliver more consistent data acquisition, even in steep terrain.
The new system introduces possibilities for real-time full waveform recording at maximum pulse rate to open opportunities for advanced and automated point classification.
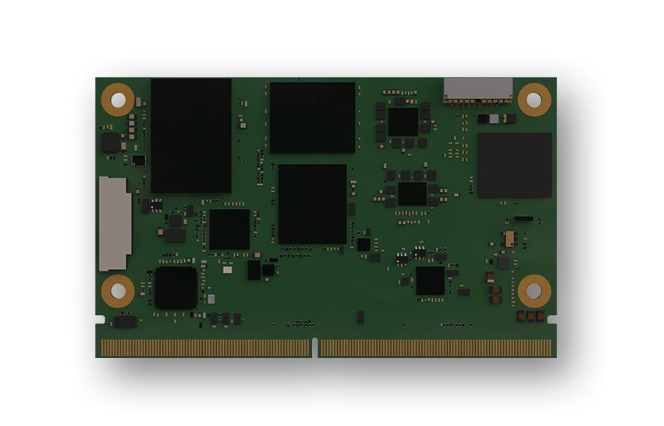
SECO, a global provider of end-to-end technological solutions for the digitalization of industrial products and processes, has released its first Smart Mobility Architecture (SMARC) System on Modules (SoMs) based on Qualcomm QCS6490 and Qualcomm QCS5430 application processors. These new SMARC modules are the first results of SECO’s strategic collaboration with Qualcomm Technologies, announced in September 2023. Both companies aim to help accelerate the development of innovative edge computing products for the industrial internet-of-things (IoT) world.
The SOM-SMARC-QCS6490 is designed to simplify the use of the Qualcomm QCS6490 processor. The chipset offers support for artificial intelligence (AI) and computing, robust performance at low power and expanded interfaces and peripherals catering to diverse industrial use cases.
The Qualcomm Adreno 643 GPU offers enhanced graphics performance and energy efficiency. It supports FHD+ at 120 fps resolution on primary and secondary displays up to 4k Ultra HD at 60Hz. The SOM-SMARC-QCS6490 supports Microsoft Windows 11 IoT Enterprise, Yocto Linux, and Android, with both commercial (0°C to +60°C) and industrial (-30°C to +85°C) temperature variants available.
The SOM-SMARC-QCS5430, powered by the Qualcomm QCS5430, is a mid-tier solution that slightly moderates CPU and GPU performance. This system-on-chip (SoC) combines enhanced connectivity, performance and edge AI-powered camera capabilities. It also provides scope for field software-based upgrades of the CPU and GPU by using the processor’s capabilities.
Artist impression; size of debris exaggerated as compared to Earth. (Image: ESA)
So much going on up there!
On Jan.11, speaking at a press briefing in Paris, Javier Benedicto, director of navigation for the European Space Agency (ESA), announced the agency had completed the procurement process for the low-Earth Orbit Positioning Navigation and Timing (LEO PNT) program. ESA expects to have the new LEO PNT demonstration satellites, which will broadcast signals over several frequency bands, up and running by 2026. A positive outcome will most likely lead to the procurement and deployment of a full European LEO PNT constellation for global services.
Also in January, news broke that Google and two of the largest mobile network operators in the world, AT&T and Vodafone, had invested more than $200 million in AST SpaceMobile’s cellular broadband network based on LEO satellites and accessible directly by smartphones. AST SpaceMobile already operates the largest-ever commercial communications array in LEO, the BlueWalker 3 satellite, which, due to its size and brightness, is alarming astronomers.
On Feb. 21, The New York Times reported about U.S. warnings to its allies that Russia might deploy a nuclear weapon in orbit this year. According to the paper, U.S. intelligence agencies told their closest European allies that, “if Russia is going to launch a nuclear weapon into orbit, it will probably do so this year — but that it might instead launch a harmless ‘dummy’ warhead into orbit to leave the West guessing about its capabilities.” A space weapon nested inside a satellite could destroy, jam, or otherwise disable dozens or hundreds of commercial and military satellites in LEO, such as the Starlink satellites that are revolutionizing global communications. See Dana Goward’s analysis.
The next day, Tim Crain, chief technology officer of the Houston-based company Intuitive Machines announced, “Houston, Odysseus has found its new home.” For the first time since Apollo 17 in 1972, a U.S.-built spacecraft had landed on the moon. Odysseus, described by the Times as “a bit bigger than a telephone booth,” (which most people under the age of 20 have never seen), was later confirmed to be upright and sending images. It was delivered into lunar orbit by a SpaceX rocket. NASA hopes this mission will help inaugurate a new era of economical spaceflights around the solar system. Intuitive Machines is one of several small companies the agency has hired to transport instruments to reconnoiter the surface of Earth’s only natural satellite in preparation for the return of NASA astronauts.
My highly synthetic description of the Federal Aviation Administration (FAA) aircraft tracking systems in last month’s First Fix was a bit muddled. Fortunately, I can count on our Editorial Advisory Board member Mitch Narins to clarify:
FAA systems determine an aircraft’s position using a combination of independent and dependent surveillance. Independent surveillance does not require the “cooperation” of the aircraft (e.g., primary radar), while dependent surveillance requires the aircraft to either respond to an interrogation signal or periodically transmit its position — e.g., Automatic Dependent Surveillance-broadcast (ADS-B).
Vodafone Turkey has integrated Adtran’s Oscilloquartz optical cesium atomic clock technology into its national network. The integration aims to enhance the resilience of network synchronization against disruptions in GNSS signals, a crucial step as the company progresses towards the implementation of 5G services.
The deployment establishes a network-wide synchronization solution capable of maintaining precise timing, even during GNSS outages. This technology is essential for ensuring continuous, reliable connectivity across Vodafone Turkey’s services.
The core of the solution, the Oscilloquartz OSA 3350 ePRC+, uses optical pumping technology for frequency stability. This device, combined with Vodafone Turkey’s existing grandmaster clocks and the Oscilloquartz clock combiner, forms the ePRTC+ system.
The system is designed to achieve a 100-nanosecond accuracy level for a period extending to 45 days, which surpasses the ITU-T G.811.1 standards for network timing.
Vodafone Turkey will implement a system across five strategic sites to mitigate risks associated with GNSS signal loss that can impact network operations and service quality. This aims to enhance redundancy and ensure network stability under challenging conditions including natural disasters and electronic interference.
savvy navvy has released Over the Horizon (OHA) automatic identification systems (AIS) in its latest mobile application update. OHA uses a phone’s internet connection to stream other vessels’ locations in real-time directly to the app to improve safety on the water.
Traditional AIS received from the transceiver on the boat has a range of a few miles, whereas OHA is designed to show vessels further afield. While OHA does require an internet connection, users do not need additional hardware to see information on vessel movements.
“Not all boaters have AIS hardware on their boats,” said says Jelte Liebrand, founder and CEO of savvy navvy. “A recent study found that depending on the vessel type, 30% of boaters, and in some cases even as much as 75%, do not own AIS transceivers. But all these boaters could benefit from OHA AIS to be able to see what’s around them and stay safe.”
OHA AIS allows savvy navvy users to see vessels directly on the chart with small and large vessel crafts defined by different colors. Users can also check how crowded the anchorage might be — either from onboard or while planning routes at home.
The savvy navvy app highlights when no position has been received for more than 30 seconds, which marks the positional variance area around each vessel and allows users to be extra vigilant when navigating.
Available on Android, IOS, PC and Mac, the savvy navvy app can be used on multiple devices and is available in both free and “premium” options with enhanced access and functionalities.
Building a solid foundation for any construction requires that the ground be adequately compacted and leveled. Construction workers and contractors operating earthmoving machines know it is nearly impossible to do that by eyesight alone. For a few decades, leveling was accomplished using rotating lasers mounted on tall tripods, which could typically cover a little more than 1,500 ft on a job site and laser receivers mounted on masts on the earth-moving machines. However, these systems only provide elevation, not position, and must be repositioned frequently.
Photo: Steer
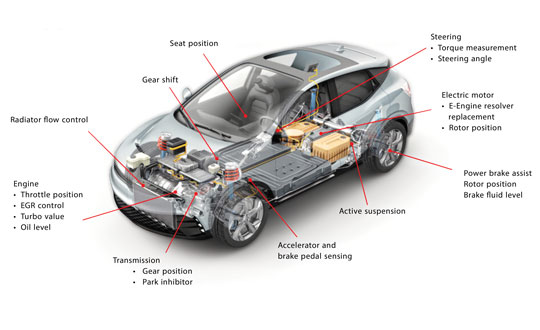
In recent years, laser leveling has been increasingly replaced by machine control systems that enable operators to compare the position of their machine’s blade with a digital grading map, and then guide it very precisely to cut the proper elevation. These machine control systems combine global navigation satellite system (GNSS) receivers, to provide the position of the machine; inertial navigation systems (INS), to bridge short gaps in GNSS availability and to provide the platform’s attitude (pitch, roll, and yaw); and a variety of other sensors, to determine the movement of the machine’s attachments, such as booms, arms and buckets.
In this month’s cover story, we feature perspectives on machine control from:
Microchip, which makes inductive position sensors that monitor the angular and linear movements of the attachments.
Septentrio, which makes the AntaRX series of smart antennas.
Besides grading, other areas for machine control include trenching at a specific depth, spot-bulldozing to better prepare a site for grading, mass excavation and contouring edges. Artificial intelligence (AI) will soon start taking over the operators’ duties, but that’s for a future article.
Controlling an earthmoving machine to perform a task requires knowing exactly where its bucket or blade contacts the dirt. Therefore, in addition to knowing the machine’s position, it is necessary to model, in real-time, the rotation at each pivot point and apply some mathematics and trigonometry.
Microchip makes an integrated circuit, known as an inductive position sensor, that is very well suited for machine control because it is not affected by the harsh conditions on most construction sites — temperature extremes, water, dust and dirt — and the vibrations caused by the machine itself. Additionally, it is not affected by the stray magnetic fields generated by electric motors, which are increasingly common on those machines.
Inductive position sensors are used in many automotive systems. (Photo: Microchip)
“We use our inductive position sensing to measure the angle or the linear movement of some sort of target to get a machine to perform its task,” said Mark Smith, product line manager for many different mixed signal products at Microchip. “For example, to control a blade on an earthmoving machine to do something, you need to have feedback about its current angle.”
Microchip also makes sensors for human interfaces, such as accelerator pedals in cars, which no longer have cables that run up to the motor. “Any sort of movement, such as the angles of rotation of a robotic arm, must be monitored and measured. Inductive position sensing is one of the up-and-coming ways to do it,” said Smith.
To direct a task, a central processing unit must then analyze and integrate the data from the sensors. For that, Microchip makes many types of computing elements — including mini-computers and microcontrollers.
“One of the things that’s coming up with many of these vehicles is ambient magnetic noise in the system,” said Smith, “because you’re next to electric motors these days. You want sensors that are immune to stray magnetic fields. We started with automotive, but we’re also seeing it now in industrial environments, including earthmoving vehicles.” Inductive position sensors, Smith said, are simpler, cheaper, lighter, and better able to withstand extreme temperatures than what they are replacing. “Also, because they are non-contact, the circuit board can be environmentally protected.”
Vibrations also are a concern. “There is an air gap between the target and the sensor itself,” Smith said. “We have an automatic gain control at the sensing side that is constantly adjusting the gain to get the maximum signal strength. This is a fast-moving control algorithm that can adjust the gain to ensure that the vibration does not affect the performance. When everything is operating at its maximum torque, this starts to matter.”
Septentrio’s AntaRx GNSS smart antenna — a box containing a receiver, an antenna and supporting electronics — is designed for machine automation and control in construction, precision agriculture and logistics. The smart antenna is enclosed in a rugged and compact housing for simplified installation. It can handle strong shocks and vibrations, which makes it ideal for harsh industrial environments such as construction and mining.
Septentrio’s AntaRx GNSS smart antenna is designed for machine automation and control. (Photo: Septentrio)
From the early stages of the product’s design and development process, Septentrio collaborated with a leading heavy construction machinery OEM, which provided feedback that helped improve the product’s specifications.
I discussed the use of AntaRx for machine control with Silviu Taujan and Danilo Sabbatini, both product managers for the product — the former with a focus on the machine automation market and the latter with a focus on INS.
What type of customers were you addressing?
Taujan: Mainly OEMs and integrators for machine control systems looking for a GNSS receiver with this kind of form factor to build into their control, automation or guidance systems.
Photo: Septentrio
A smart antenna is easy to install on various machines, correct?
Taujan: Yes. It saves space and the cabling is much simpler. We have a single rugged connector for power and data. Our latest generation of GNSS boards has dual antenna support. You can deploy one smart antenna and feed an auxiliary antenna — the AntaRx-AUX — into it for dual antenna heading capability.
Where does the INS come in?
Sabbatini: The GNSS/INS version is the AntaRx-Si3. It has an industrial-grade IMU that gives very high quality sensor fusion to bridge gaps in GNSS or correction signals. It also provides accurate attitude — pitch, roll and heading. We use this INS mostly for applications that require full 3D attitude, and for integrity and availability. It is built for one minute without GNSS.
Does all the processing happen inside the box?
Sabbatini: The output is a 100 Hz fused position. It will be fused by default to GNSS, plus IMU. The system can also accept the platform’s velocity as an extra input for sensor fusion. The output can include the raw GNSS position, the GNSS-only position and the raw IMU data.
What are some use cases?
Sabbatini: For INS, the most important use case is precision agriculture. For many ag robots, a smart antenna is the form factor of choice and most of them require INS sensor fusion. This INS product is the easiest to integrate because everything is fused inside the enclosure. Also, compared to other form factors, the customers do not need to worry about the lever arm between the antenna and the IMU because it’s inside the box, so it’s already taken into account. So, this form factor eliminates all the installation problems inherent to an INS system. The German company Sodex is creating a real time mapping system to install on top of machine controls. Another application is for users who want to close gaps in signals, especially in smaller machines that are going more often between buildings and close to structures.
Taujan: For the version without INS, we’re looking at the more mainstream machine control customers and applications. Even from the conceptual phase of this, we started by engaging with some customers, including one large OEM in the Asian excavator market. Then, from the aftermarket or integrator side, one machine control integrator integrated it into a system for asphalt pavers. These are not yet commercially available systems, but we’re in the development phase with them.
Gundersen & Løken AS, in Oslo, Norway, founded in 1899, develops equipment for the construction industry. It uses Septentrio’s AntaRx in its Dig Pilot 3D machine guidance system, which it began to develop in 2007. The company is now launching the next-generation DigPilot to assist excavator drivers. Its DigPilot Terra user interface and graphics offer a wide range of functionalities for efficient earthwork. The development of DigPilot Terra is funded partly by Innovation Norway.
DigPilot uses multi-axial CAN bus angle sensors on all moving parts — chassis, boom, arm and bucket — to calculate the position of the bucket tip with centimeter precision. The sensors are gyro-stabilized and hold firmware that predicts angles in the coming milliseconds based on angles from the previous milliseconds. These calculated angles are pushed to the computer in the cabin, which can visualize the bucket position in real-time.
DigPilot is a two-antenna system. Until now, it relied on two Septentrio GNSS antennas installed on the rear of the excavator — one to determine the machine’s position and one to determine its heading. These data are fed to the Septentrio GNSS receiver (rover) inside the machine, which also receives correction data via internet or radio. The data from the GNSS rover is pushed to the computer in the cabin and, when combined with the angular sensor data, provides the exact coordinates of the bucket tip and the delta value of the finished project.
Now, Septentrio’s AntaRx technology makes DigPilot’s installation simpler and more robust because the built-in GNSS rover in one of the rear antennas greatly reduces the amount of cabling and the number of connectors.
I discussed DigPilot with Eric Floberg, the company’s managing director since 2019 when he took over from his father, and Erik Sørngård, the company’s R&D manager, who has been working with Septentrio products for 12 years.
When did you start working with Septentrio on AntaRx for DigPilot? At what stage of deployment is it?
Sørngård: We began to discuss features about four years ago. At that time, we had worked with other Septentrio products for eight years. So, they appreciated our cooperation and wanted to show us where their next stage in development was heading. Last year, they approached us again, to see whether we could start looking further into it.
Floberg: We now have one system here for testing and we have experience from the previous Septentrio products, such as the rover GNSS receivers, which have always given us the best of accuracy. Of course, now, we see the potential to make our system more robust and simpler. As soon as we have sold out the existing Septentrio products, we will incorporate the AntaRx into our next-generation machine control system.
Is DigPilot receiver-agnostic, even though you have a preference for the AntaRx?
Floberg: All the connections, the cabling and the components themselves are exposed to very tough environments and stresses of different kinds, such as extreme temperatures and vibrations. So, reducing the number of components and connections and cabling would definitely give us a higher uptime, which is the most important thing for our end users.
Having the antenna and the receiver in the same box means less cabling and easier installation, correct?
Floberg: Definitely. The anti-theft aspect here is also very important. In certain parts of the world, you will appreciate the opportunity to easily remove it from your excavator or bulldozer when you leave at night.
What are the key challenges?
Floberg: This winter has been the toughest one in Norway in 30 years. We have also had the chance to do some testing in very low temperatures and harsh environments. When we see it work as well as it does, we feel very confident about it.
What accuracy have you been getting?
Sørngård: When it comes to machine control, we look at the end result on the tip of the bucket. We have several sensors, and we have to calibrate the machine accurately. The receiver is not the biggest contribution to the noise in the algorithms. We trust that the Septentrio receiver delivers accurate numbers, and we must push ourselves to make the rest of the system meet the same standards.
Floberg: On 30-ton or 40-ton excavators with booms up to 10 meters long we are able to get sub-centimeter accuracy, but the tip of the bucket in such a machine is 1 in thick. Of course, there are many other factors, such as the wear and tear of the machine.
Is DigPilot typically factory-installed or aftermarket?
Floberg: We’ll do both. We are often called by the distributor — say, Volvo or Hitachi or Kobelco — to install an integrated system.