On December 5, in Houston, at a reception hosted by the Resilient Navigation and Timing Foundation to celebrate GPS’ 50th anniversary, I had the honor of publicly interviewing Dr. Bradford Parkinson for 45 minutes. When I asked him how GPS today differs from the design that emerged from the Lonely Halls meeting he chaired 50 years ago this past September, he replied, proudly, that “there is no fundamental difference.” Recently, he recalled, he pulled out for the first time in 20 years a handheld Trimble EnsignGPS — “It was one of those little devices that got shipped to the Iraq War,” he noted —, cleaned its contacts, changed its batteries, turned it on, and was immediately able to navigate. “The point of the story,” Parkinson said, “is that evidently it still works.”
When I asked him what he considered to be the most significant impact of GPS on society, he said it was “also probably the most perilous: kids today just take it for granted. They know where they are.”
Taking GPS for granted, however, is not limited to kids today. It is a pervasive attitude throughout our society, including sectors of the federal government that ought to know better. That is why a recurrent theme throughout the 29th meeting of the National Space-Based Positioning, Navigation, and Timing Advisory Board, on December 6 and 7, which I attended, was raising the alarm about the fact that GPS is falling behind Galileo and BeiDou.
“We must attack this mindset [that GPS is] the Gold Standard and everything is OK. It is not OK,” said Admiral Thad Allan, a former Commandant of the U.S. Coast Guard, who chairs the PNT Advisory Board. Perhaps, he suggested, it is time to declare that GPS is only meeting “the Pewter Standard” for GNSS. “That will get the attention of somebody who does not understand this.”
Parkinson, in emphasizing the urgency of the problem, said that he currently counts eight areas in which GPS is falling behind its GNSS counterparts, including:
L5, the go-to signal particularly for civilian aviation, is not yet activated and will not be until the next three satellites are activated, which will likely not happen for at least another year.
The Next Generation Operational Control System (OCX), the future version of the GPS control segment, is not yet operational.
GPS does not have a satellite-based high-accuracy service (HAS). On this, he said, “Everyone is moving out except us.”
GPS lacks anti-spoofing authentication, which Galileo has.
Additionally, “every one of these things has an enormous lead time,” Parkinson warned.
“As an advisory group, we are only as effective as the willingness of the system that we are advising to act on what we say,” Allan pointed out. The Advisory Board spent the final portion of its meeting discussing how to structure the agenda and products of its next couple of meetings to get these issues with GPS the attention they deserve and require. Stay tuned.
NASA researchers at Langley Research Center in Hampton, Virginia, have successfully flown multiple UAVs beyond visual line of sight (BVLOS) with no visual observer. The UAVs dodged one another and successfully maneuvered around obstacles before safely landing, the agency said. NASA conducted the tests to help researchers someday create autonomous, self-piloted helicopters that could carry passengers and cargo through busy aerospace.
Researchers used multiple Alta 8 UAVs loaded with software designed to enable autonomous flights. Although monitors observed the flights from a remote-control room at Langley, the UAVs successfully operated BVLOS.
NASA is also testing elements of autonomy using helicopters. They are designed to contribute towards the development of autonomous helicopters that can take off and land from “vertiports,” and transport passengers and cargo over both short and long distances.
The experiments are part of the agency’s Advanced Air Mobility Mission (AAM), which is designed to enable safe autonomous flight and integrate newly developed vehicles into the national airspace. The mission will “set the stage for a flourishing industry” of electric air taxis and UAVs by 2030, NASA says on its AAM website.
NASA will transfer the technology created during this project to the public to ensure industry manufacturers can access the software while designing their vehicles.
ANELLO Photonics has released the ANELLO X3, its 3-axis optical gyroscope inertial measurement unit (IMU) designed for GPS-denied and challenging environments.
The IMU leverages ANELLO SiPhOG (Silicon Photonics Optical Gyroscope) technology and serves as a light, low-power tri-axial optical gyroscope offering high accuracy, performance and reliability for autonomous applications.
The ANELLO X3 can be used in a variety of applications, including autonomous commercial and defense applications involving robots, UAVs, electric vertical take-off and landing (eVTOL) aircraft and various maritime and land vehicle applications, including high-accuracy surveying and mapping.
GNSS researchers presented hundreds of papers at the 2023 Institute of Navigation (ION) GNSS+ conference, which took place Sept. 11-15, 2023, in Denver, Colorado, and virtually. The following four papers focused on the use of precise-point positioning for various applications. The papers are available here.
Smartphone Positioning Resiliency
Ultra-low-cost GNSS receivers used in smartphones have several drawbacks that include insufficient observations and poor signal reception quality compared to higher-cost receivers. The authors of this article proposed that using native sensors and precise-point positioning (PPP) augmentation can offer resilient smartphone positioning.
During their research, the authors deployed only inertial measurement unit (IMU) and GNSS sensors native to existing smartphones. They were able to achieve a standalone solution using PPP and IMU integration that performed better than standard techniques.
In vehicle experiments with unobstructed sky, the sensor integration algorithm achieved 1.6 m horizontal RMS. This reduced 80% of horizontal errors in GNSS-challenged environments through a tightly coupled GNSS-PPP solution that has not appeared in any other publications according to the authors.
To address resilient smartphone positioning, the authors stated that sensor fusion is also being explored by using smartphone sensors, including IMUs, cameras, and other fusion techniques.
Yang, Yi, Vana, and Bisnath, “Resilient Smartphone Positioning Using Native Sensors and PPP Augmentation.”
Multi-GNSS PPP and MEMS IMU Integration for Navigation in Urban Environments
This paper addressed the issue of accurate, precise and continuous navigation in obstructed environments for vehicles. To provide a low-cost lane-level navigation solution for automotive applications, the authors proposed an integrated solution featuring low-cost GNSS PPP and MEMS-based IMUs.
During the authors’ research, they introduced a low-cost, triple-frequency GNSS, a MEMS-based IMU and a patch antenna to achieve decimeter-level accuracy in suburban and urban environments. Low-cost hardware and software were used to bridge GNSS gaps in urban environments to provide a continuous, accurate, and reliable position solution that is novel and has not been previously published, according to the authors.
The low-cost navigation system demonstrated an accuracy of less than a decimeter in the presence of a sufficient number of satellites. During half a minute of introduced GNSS signal loss, the overall RMS of the algorithm was 10% to 40% better than dual-frequency PPP with IMU as the satellite availability was reduced.
The results obtained during partial GNSS availability indicated a step forward in the low-cost navigation area for applications such as low-cost autonomous vehicles, intelligent transportation systems, and more that demand a decimeter level of accuracy.
Vana and Bisnath, “Low-Cost, Triple-Frequency, Multi-GNSS PPP and MEMS IMU Integration for Continuous Navigation in Simulated Urban Environments.”
Message Authentication for PPP/PPP-RTK Data
This paper analyzed candidate schemes for PPP/PPP-real-time kinematic (RTK) data authentication. As current PPP/PPP-RTK services are not authenticated, the motivations behind the authors’ research were the new availability of GNSS authentication services such as the Galileo Open Service Navigation Message Authentication (OSNMA), new PPP/PPP-RTK services such as QZSS Centimeter Level Augmentation Service (CLAS) and Galileo High Accuracy Service (HAS), and more.
In this paper, asymmetric schemes were proposed based on existing standards and compatibility with GNSS messages. Post-quantum cryptographic signatures were also reviewed and discussed. Two of the schemes were selected for analysis: digital signature based on ECDSA, and delayed disclosure based on a hybrid scheme using the TESLA protocol.
Each of the schemes was described in detail for both Galileo HAS and QZSS CLAS. The performance of the schemes in terms of time to receive the corrections message and the increase in the age of the data was analyzed. The analysis was complemented by a review of the CPU consumption at receiver level.
Fernandez-Hernandez, Hirokawa, Rijmen, and Aikawa, “PPP/PPP-RTK Message Authentication.”
Creating Consistent RVIM By Estimating Receiver Biases
Ionospheric augmentation is one of the most important dependences of PPP-RTK. Due to the dispersive features of the ionosphere, the ionospheric information is usually coupled with satellite- and receiver-related biases. This could result in inconsistent ionospheric corrections if a different number of reference stations are involved in the calculation.
In this paper, the authors aimed to introduce a consistent regional vertical ionospheric model (RVIM) by estimating receiver biases. First, they presented the inconsistent ionospheric corrections under sparse networks. Then the RVIM was compared with the International GNSS Service (IGS) final global ionospheric map (GIM) product, and the average of differences between them is 1.13 TECU.
The slant ionospheric corrections were then employed as a reference to evaluate both RVIM and GIM. The RMS values were 1.48 and 2.23 TECU for the RVIM and GIM. Finally, the authors applied the RVIM into PPP-RTK.
The results showed that the PPP-RTK with RVIM constraints improved horizontal errors, vertical errors, and convergence time by 43.45%, 29.3%, and 22.6% under the 68% confidence level, compared with conventional PPP-AR.
Lyu, Xiang, Tang, Pei, Yu, and Truong, “A Consistent Regional Vertical Ionospheric Model and Application in PPP-RTK Under Sparse Networks.”
The Air Force was initially opposed to GPS. How did that change?
Between 1978 and at least the mid-1980s, maybe even the late 1980s, the Air Force tried several times to cancel the program. At the time, I was a Capitol Hill staffer for the House Intelligence Committee. In one of those efforts to cancel GPS, Tom Cooper, who was a lead staffer for the House Armed Services Committee, came to me and said, “Can you guys give any reason for keeping GPS?” And I said, “Yes, it greatly improves the accuracy of SIGINT [signals intelligence] locations. It makes a very big difference.”
So, Tom used that, along with other arguments, for why we should keep GPS. The Committee and Congress ultimately decided they would, despite the Air Force’s resistance.
The Air Force’s resistance came from the Strategic Air Command, which in the 1980s believed it would never use satellites. They were concerned about the satellites being shot down. I found this amusing because they were flying around in aircraft at a few thousand feet and were concerned about satellites flying at 11,000 miles. But they were, so they were laggards.
Image: USAF/Staff Sgt. Kyle Johnson
Which service adopted GPS first and why?
The service that by far led the way was the Army. It spent $100 million a year absorbing NRO capabilities. They also spent money on GPS, though not as much. By the time we got to the first Gulf War, in 1991, we had a partial GPS constellation — I think of 18 satellites of the 24 required — and that meant that you didn’t have 100% coverage all day long. So, coverage maps of their areas of interest were generated every day to let people in the field know when they would have service. Most of them didn’t have receivers either. Most of the receivers they did have were Precision Lightweight GPS Receivers (PLGR), knows as “pluggers”, which were the first “handheld” receivers, but they were pretty big.
Once the fight got going, many of the troops wrote home and asked their moms and dads to send them civilian receivers.
Yes! Thousands and thousands of them showed up in theater. Some troops taped them to the windscreens of their helicopters or jet aircraft. They were just jury-rigged into everything because, despite their limitations at the time, they were very, very useful, unlike anything else. So, now everybody realized, “Oh my goodness, this is really a big deal. This is a game changer!”
Then we got more modern receivers, integrated receivers, the whole thing. However, at the end of the Gulf War, the Air Force still had no plan to equip any of its aircraft with GPS. As Assistant Secretary of the Air Force, I was called over to the Armed Services Committee and asked, “What is your plan for integrating GPS receivers into your aircraft fleet?” I said, “There is no plan.” and they were incredulous. They looked at me like “Well, you’re an idiot.”
It wasn’t me, however, and the staff knew my story before I gave it. As a result, Congress mandated it. They put it in that year’s National Defense Authorization Act (NDAA). Within less than 10 years you had Joint Direct Attack Munitions (JDAM) and other GPS-guided weapons. So, that got it moving quickly.
By the end of the 1990s, the Air Force was fully on board and were equipping their aircraft with many weapons that depended on GPS. Meanwhile, GPS had moved to a full constellation of 24 satellites. Full operating capability was declared in 1995. The Navy proceeded similarly, but they were somewhat less affected. So, the Army remained a leader in using space.
The Chief of Staff of the Air Force asked me about Air Force use of GPS. I said, “Chief, the Air Force builds a lot of space stuff, but it doesn’t use it.” Of course, a short time later it was using it extensively. So, this ramp-up was very rapid — just a few years from “I don’t give a darn about these things” to “I can’t live without them.”
Brad Parkinson and his successors as JPO directors designed and built the system but had no role in its adoption, right?
No. They were going turn it over to the production house, if you will, and they did. Once the Air Force got on board with GPS guided weapons, adoption proceeded rapidly.
What about the Navy?
I don’t recall the Navy particularly. I do not at all accuse them of being laggards. I think they did what they needed, whatever that was.
Did later NDAAs expand that mandate to the other services?
I don’t know. I was out of the government by that time, so I lost track. I don’t think it was necessary. What people didn’t understand immediately was that you could do anything with this system. At the end of the day, it is a super accurate timing signal. There are many things you could do with that and people have done them. It quickly became evident that it was so pervasively useful, that anything you could think of involves GPS, from the era of the first Gulf War onward. By 10 years later, many weapons systems in all the services were GPS-guided. I later served on the board of ATK and we were building GPS-guided artillery rounds. I am pretty sure that the ATACMS [Army Tactical Missile System] you hear about today is GPS guided.
So, in a couple of years, all the services wanted to integrate GPS in all their platforms and weapons.
Well, except that the amazing thing was, despite all the things that people had done with GPS in the Gulf War — starting with those helicopters that went in the first night and took out the command and control system, which were guided by Army-provided pluggers taped onto the windscreens by their pilots, and downed pilots using GPS to give their coordinates to the rescue teams — at the end of the war the Air Force still didn’t have a plan to put them on its aircraft! That’s when Congress mandated it. It was amazing.
Despite that, once they got going, particularly once they got going with GPS-guided weapons, everything changed. I don’t know whether the Air Force became leaders, but they were certainly aggressive integrators of the program into the service. There was no more, “We won’t use satellites” and all that.
That was after my time. I left government in early 1993. There were other big fish to fry at the same time. As important as I realized it was, I still didn’t realize how important it was, and I was way ahead of most everybody else, in the Air Force anyway.
The Federal Aviation Administration’s (FAA’s) chief scientist at the time said, “The great thing about GPS is that it is a tool around which you can build myriad capabilities.” He outlined a few for the FAA, many of which they have since done. The same thing began to happen in the services, particularly in the Air Force, in which GPS-guided weapons were pervasive within 10 years.
Part of Brad’s motto for JPO was “The mission of this program office is, number one, to drop five bombs in the same hole.”
Yeah. By the way, one mistake that people make a lot is they think there were GPS-guided weapons during the first Gulf War. That was not the case. There were none by then. There were precision guided munitions that were guided by maps and lasers and a variety of means. But, despite the belief of many authors, there were no GPS-guided weapons at that time.
So, which was the first conflict in which GPS was used?
It was the Iraq War, in 2003. It was a major user of GPS-guided weapons.
Any other thoughts on the 50th anniversary from the military side of things?
It is impossible to overemphasize the importance to military operations and, frankly, to civilian life as well, of being able to easily and accurately navigate or have highly accurate time.
You can do it with a $100 receiver, whereas it used to require a $10,000 receiver and you had to have it re-initialized from a standard. So that’s what everybody does. Now, this has created probably more dependency than is healthy and many nations have backup that we don’t have.
Such as Loran-C. That’s a big subject of debate these days, as you know.
Well, it’s been a subject of debate for 20 years. Everybody agrees, but nobody moves.
The Department of Transportation recently released an action plan on the adoption of complementary PNT systems. So, there’s some movement.
As a one-time government bureaucrat, what you do when people are on your back is launch a study and say, “Well, it will be done in a year or two.” They have done this time, after time, after time.
Point One Navigation has integrated Ordnance Survey base stations into the Polaris Network, which is designed to improve accuracy, precision, reliability and interoperability in the UK. The solutions aim to aid in applications such as advanced driver assistance (ADAS), robotics, mapping and more.
Polaris is a real time kinematic (RTK) corrections network that offers cm-level accurate GNSS positioning. Polaris’ global RTK network now includes the entire United States, EU, Australia, Canada and the UK.
Existing Polaris customers can utilize the UK integration immediately, at no additional cost.
This technology is complemented by the company’s FusionEngine software, which further integrates inertial measurement, wheel odometry and additional sensors to achieve the desired level of precision, even in the absence of satellite signals.
Polaris supports all major GNSS constellations and has a dense global network of base stations, which offers improved precision acquisition time in more places, the company says. The network supports all modern navigation signals across all mobile networks.
According to Point One, it is the first localization service with a modern GraphQL-based API, which aims to improve the integration of Polaris RTK into developer-built applications. It can be used by software developers to integrate RTK into demanding applications, including industrial autonomy, precision agriculture, logistics and delivery, robots and ADAS.
It will support State Space Representation (SSR) corrections delivered by L-band satellites in early 2024, the company says, which will allow for operations to continue in the absence of cellular networks or in bandwidth constrained applications.
The Federal Aviation Administration (FAA) has granted Percepto a nationwide waiver to operate a full fleet of its UAVs remotely by one operator.
Prior to the approval, Percepto UAVs required one pilot per UAV. Now, users can operate up to 30 drone-in-a-box systems simultaneously with one pilot. The waiver aims to improve the capabilities of beyond visual line of sight (BVLOS) UAV operations across the U.S. By utilizing remote pre-flight checks and advanced automation, this waiver eliminates the need for human interference or expensive radars.
According to the company, the approval is the final regulatory step to achieve large-scale remote UAV operations, following the recent approval for nationwide BVLOS operations.
Percepto’s drone-in-a-box systems consist of a UAV that operates out of a docking station, often used in remote or hard-to-access locations. When set up with a power source and internet connection, the docking station charges and autonomously operates the UAV, allowing operations to run 24/7 and reducing reliance on human presence or interference.
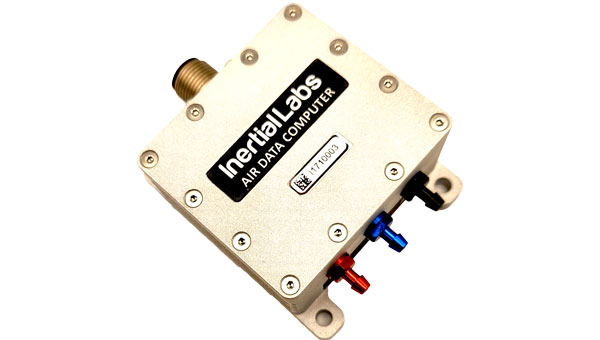
Inertial Labs has introduced its ADC inertial navigation system (INS) designed to calculate and provide air data parameters, including altitude, air speed, air density, outside air temperature (OAT) and windspeed for avionic applications.
ADC’s compact form makes it easy for users to integrate into existing UAV systems with strict size and weight requirements. The INS calculates the air data parameters using information received from the integrated pitot and static pressure sensors, and an outside air temperature probe.
This compact device consumes less than one watt of power. It is designed for the most demanding environments, has a IP67 rating, and integrates total and static pressure sensors to calculate indicated airspeed accurately. ADC also supports aiding data from external GNSS receivers and ambient air data, which enhances its precision in a variety of flight conditions.
SimActive Inc., a developer of photogrammetry software, and the Alabama Department of Transportation (ALDOT) have partnered to use SimActive’s Correlator3D software to process UAV imagery for damage assessment.
In early 2023, a powerful tornado ripped through the southwest portion of the city of Selma, Alabama. ALDOT quickly collected more than 18,000 images of the area. The SimActive software allowed the team to process the data within 24 hours and deliver digital surface models and orthomosaics.
Correlator3D is an end-to-end photogrammetry solution designed to generate high-quality geospatial data from satellite and aerial imagery, including UAVs. The software performs aerial triangulation (AT) and produces dense digital surface models (DSM), digital terrain models (DTM), point clouds, orthomosaics, 3D models and vectorized 3D features.
Powered by graphics processing unit (GPU) technology and multi-core central processing units (CPU), Correlator3D offers enhanced processing speed to support the quick and efficient production of large datasets.
An expert safety review team assembled by the Federal Aviation Administration (FAA) addressed several near-misses at U.S. airports in recent months. The group has called for “urgent action” to be taken to maintain airline safety.
The National Airspace System Safety Review Team released a 52-page report on Nov. 15, which cited air traffic control staffing shortages, technology issues and funding needs as the suspected reasons for the incidents.
The review team, which includes former FAA executives, a former National Transportation Safety Board chairman and former aviation union leaders, was established in April 2023. The group was tasked with examining the air traffic control system and delivering recommendations on how to enhance safety, according to the FAA.
Additionally, the report said that past investments in overhauling FAA technology have worsened the agency’s technology. Newer systems are being layered on top of older systems, and few of the old systems have been decommissioned or replaced, according to the report.
The old systems are becoming difficult to maintain because companies have gone out of business, spare parts are no longer available and the older workers who installed the technologies are retiring without passing knowledge onto younger employees. The equipment replacement backlog is $5.3 billion.
The panel also called for significant changes to the way air traffic controllers are trained. The report said using upgraded simulators and removing “unnecessary and outdated curriculum” could lead to faster certification and more employees.
Transportation Secretary Pete Buttigieg said the FAA is 3,000 controllers short of its goal, and according to the union representing controllers, the ranks grew by only 6% in the past year. If the current hiring plan is followed, only 200 empty seats would be filled, the report said.
The understaffing is causing controllers to work significant amounts of overtime, which the report said is causing “absenteeism, lower productivity and fatigue.”
The report comes as the National Transportation Safety Board is conducting separate investigations into several of the near collisions, one involving a near collision in Boston and a collision involving two private jets in Houston. The near misses have since caught the attention of Congress. A Senate subcommittee held a hearing on Nov. 9, where Jennifer L. Homendy, chairwoman of the National Transportation Safety Board, stressed the importance of safety checks to maintain airline safety.
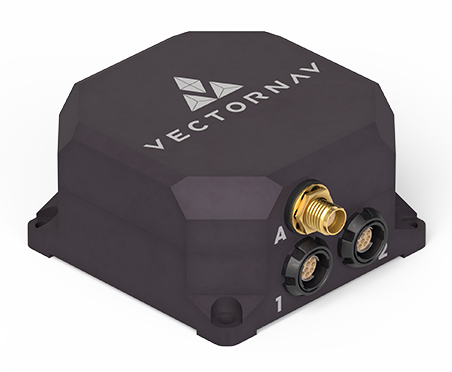
VectorNav Technologies has released two products, the VN-210-S and VN-310-S, which expand its tactical series of GNSS-aided inertial navigation systems (INS).
The VN-210-S GNSS/INS combines a tactical-grade inertial measurement unit (IMU) comprised of a 3-axis gyroscope, accelerometer, and magnetometer with a triple-frequency GNSS receiver. The integrated 448-channel GNSS receiver from Septentrio adds several capabilities, including L5 frequencies, moving baseline real-time kinematic with centimeter-level accuracy, support for Galileo OSNMA and robust interference mitigation.
These capabilities and high-quality hardware offer improved positioning performance in radio frequency-congested and GNSS-denied environments.
Image: VectorNav
The VN-310-S dual GNSS/INS leverages VectorNav’s tactical-grade IMU and integrates two 448-channel GNSS receivers to enable GNSS-compassing for accurate heading estimations in stationary and low-dynamic operations. The VN-310-S also gains support for OSNMA and robust interference mitigation, offering reliable position data across a variety of applications and environments.
The VN-210-S and VN-310-S are packaged in a precision milled, anodized aluminum enclosure designed to MIL standards and are IP68-rated. For ultra-low SWaP applications, VectorNav has introduced L5 capabilities to the VN-210E (embedded) when using an externally integrated L5-band GNSS receiver.
What is the most promising innovation in satellite navigation being introduced by BDS, Galileo, QZSS, or NavIC?
“Two things are having an immediate impact: authentication methods, such as Galileo’s Open Service-Navigation Message Authentication (OS-NMA), and the proliferation of correction services for high accuracy. Navigation message authentication offers a practical, easy-to-implement defense against several (though not all) types of spoofing attacks. QZSS and NavIC offer this too. And though paid correction services have been available for some time, Galileo’s High Accuracy Service (HAS) will bring it into the mainstream. Sometimes innovation is just applying simple techniques in a useful, efficient manner.”
For critical infrastructure, how good a remedy are multi-constellation receivers to GNSS vulnerability?
“Multi-constellation receivers do not do much to combat jamming and spoofing; they only detect failures in a constellation itself through comparison. Since they all are open standards, a good spoofer can fake all the systems simultaneously. Multi-frequency receivers are a bit more resistant to jamming, since one must jam multiple bands, but since all the bands are relatively close, the barrier is not high. To be truly resilient, you need diverse, redundant PNT sensors — IMUs, CRPAs, strong signals of opportunity, lidars, etc. — in addition to GNSS receivers.”