This is an introduction to the November 2023 Innovation article, “Using GNSS Phase Reflectometry on Maui’s Haleakalā”
We’ve all seen the news reports of the terrible devastation and loss of life in the town of Lahaina on the island of Maui by a wildfire this past August. Those terrible reports jarringly contrasted with happy memories of visits to Hawaii and its paradise islands. I recalled my visit some years ago to Maui in particular. My wife and I traveled all around Maui, but we particularly enjoyed the drive up to the top of Mount Haleakalā.
Rising to just over 3,000 meters, Haleakalā is a large, active (though currently dormant) shield volcano that forms about 75% of Maui. Just below its summit there is a visitor center with informative panels describing the geology of the volcano and the flora and fauna to be found on its flanks. On the drive up, for example, you can see endangered nēnē, the Hawaiian Goose, and the threatened silversword plants, which only bloom once in their lifetimes. And the sunrise and sunset views from the summit are quite beautiful.
A few hundred meters away from the visitor center is the Haleakalā High Altitude Observatory Site — a complex informally known as “Science City.” The site accommodates various optical telescopes and other instruments, including among others the 4-meter-aperture Daniel K. Inouye Solar Telescope (the largest solar telescope in the world), a satellite laser ranging station, and the Maui Space Surveillance Complex, which consists of a suite of telescopes operated by the Department of Defense for satellite tracking.
Also at the site is an innovative system observing the ocean surface far below using the phase of GNSS signals. Not only receiving normal line-of-sight signals from satellites, this system also receives signals that are reflected by the ocean surface, a technique called GNSS reflectometry or GNSS-R. GNSS-R can be thought of as a bi-static radar, where the transmitters (the GNSS satellites) and the receiver are separated by a large distance. The receiver can be on Earth’s surface, on an aircraft or on a low-Earth-orbiting satellite. The reflected signals contain information about the surface from which they were reflected. Depending on the receiver’s location and with suitable data processing, parameters such as ground surface elevation and its variation, water level and tide height, sea state (wave height, wind speed and wind direction), soil moisture content, and even snow depth can be deduced.
Over the years, we have had a number of articles on GNSS-R in this column using different receiver platforms (April, 1999; October, 2007; October, 2009; September 2010; September 2014; and October, 2019). In this quarter’s “Innovation” column, we have an article by some members of the team who built and operate the GNSS-R system on the top of Haleakalā. They explain how the system works and some of the preliminary observations and results they have obtained. More science in paradise!
Originally developed for navigation and timing applications, signals from global navigation satellite systems (GNSS) are now commonly used for geophysical remote sensing applications, including observation of Earth’s surface and atmosphere using near sea-level ground stations as well as mountaintop, airborne and spaceborne platforms. GNSS reflectometry (abbreviated GNSS-R), which is the technique of using reflected signals to measure properties of Earth’s surface, has been a growing area of research and application for GNSS remote sensing. Notably, the Cyclone Global Navigation Satellite System (CYGNSS) satellite mission produces delay-Doppler maps (DDMs) that are used to monitor ocean surface wind speeds during hurricanes. Meanwhile, terrestrial and airborne GNSS-R has been used to monitor soil moisture, snow depth and vegetation growth. One area of increasing interest is precision reflectometry using signal carrier-phase measurements. The first attempt to perform precision (phase) altimetry over sea ice using GPS reflectometry measurements from the low-Earth orbiting TechDemoSat-1 was reported by researchers in 2017. Subsequently, researchers demonstrated the use of reflections collected by a Spire satellite to perform altimetry over Hudson Bay and the Java Sea and how reflections off ice in the polar regions can be used to measure ionospheric total electron content over the polar caps. While these demonstrations of GNSS-R for precision carrier-phase-based reflectometry are promising, more work needs to be done to characterize when carrier-based altimetry is feasible and what challenges it faces.
To study the challenges associated with processing reflected and low-elevation-angle radio occultation signals, the University of Colorado (CU) Boulder Satellite Navigation and Sensing (SeNSe) Laboratory has deployed a GNSS data collection site on top of Mount Haleakalā on the island of Maui, Hawaii. Recent collection campaigns aim to use this site as a testbed for GNSS-R algorithms that utilize multi-frequency and multi-polarization measurements. Previously, we carried out delay map processing for left-hand circular (LHC) and right-hand circular (RHC) polarizations for L1 and L2 GPS signals. Those results validate the open-loop processing methodology and provide an initial assessment of the data quality. We observed that the received reflected signals show deep and rapid fading in amplitude. In the work reported in this article, we extend our assessment to triple-frequency GPS (L1CA, L2C, L5Q) signals and document our methodology for extraction of the signal carrier phase. Our initial results indicate that coherent signal phase extraction is challenging, and may not be feasible for this particular experiment setup. We discuss ways in which the experiment may be improved for the purpose of obtaining coherent ocean surface reflections in the future.
EXPERIMENT BACKGROUND
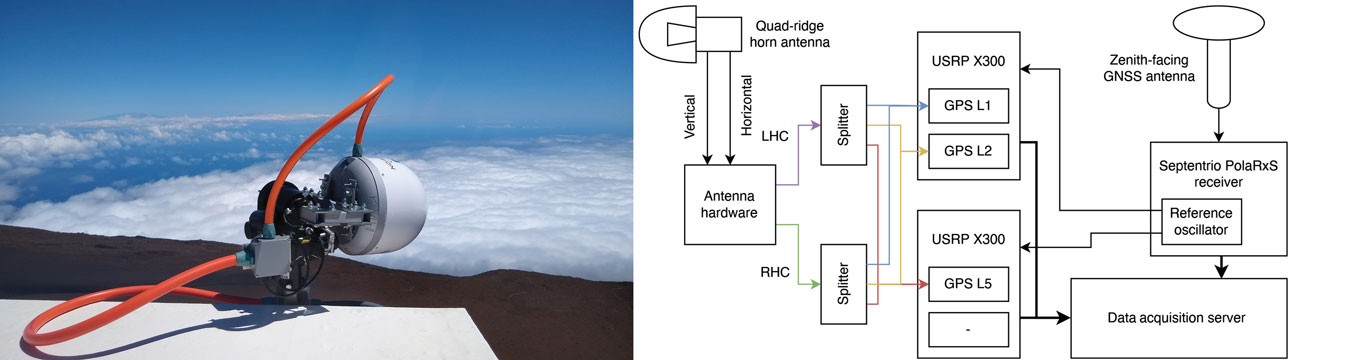
The current form of the CU SeNSe Lab Mount Haleakalā GNSS experiment was deployed in June 2020. It consists of a side-facing dual-polarization horn antenna, which is shown in the left panel of FIGURE 1, along with a zenith-facing reference antenna. The horizontally- and vertically-polarized wideband signals from the horn antenna are fed into front-end hardware and are combined using 90-degree phase combiners to form LHC and RHC polarized signals, which are then recorded by a set of Ettus Universal Software Radio Peripherals (USRPs). Meanwhile, the signal from the reference antenna is sent to a Septentrio PolaRxS receiver. The right panel in Figure 1 illustrates the system setup. Note that the Septentrio onboard oven-controlled crystal oscillator is used to drive the USRPs. This allows us to use the Septentrio outputs to estimate the receiver clock variations and use them in the receiver clock component of our open-loop models, which we discuss below.
Figure 1: The side-facing horn antenna in its radome enclosure (left panel) and the hardware block diagram of the data collection system (right panel). (All figures provided by the authors)
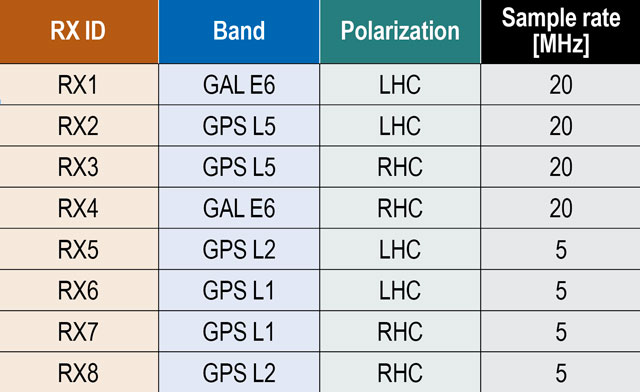
Each USRP can record up to four signals at two different mixdown frequencies, allowing for recording of both the RHC and LHC polarized signals on up to four different bands. The first USRP records the L1 and L2 bands with center frequencies at 1575.42 and 1227.6 MHz, respectively, at a bandwidth of 5 MHz. The second USRP records the L5 and E6/B3 bands at center frequencies of 1176.45 and 1271.25 MHz and at a 20 MHz bandwidth. TABLE 1 lists the IDs for each receive channel along with its corresponding band, polarization and sampling rate. Note that the recorded signals covering the E6 band also capture BeiDou B3 signals, but we restrict our analysis to GPS L1, L2 and L5 signals in this article. The samples from these USRPs are written to disk along with the Septentrio Binary Format (SBF) output of the PolaRxS receiver.
Table 1: Receiver IDs with corresponding band and polarization.
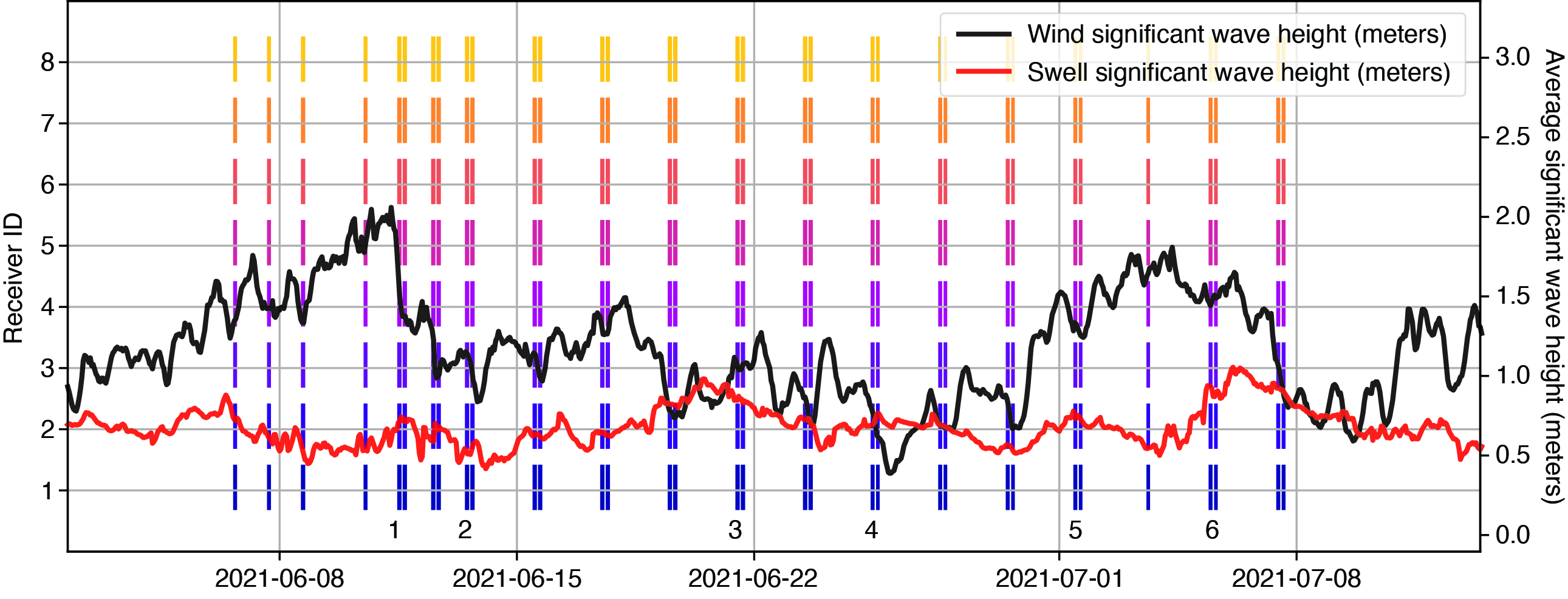
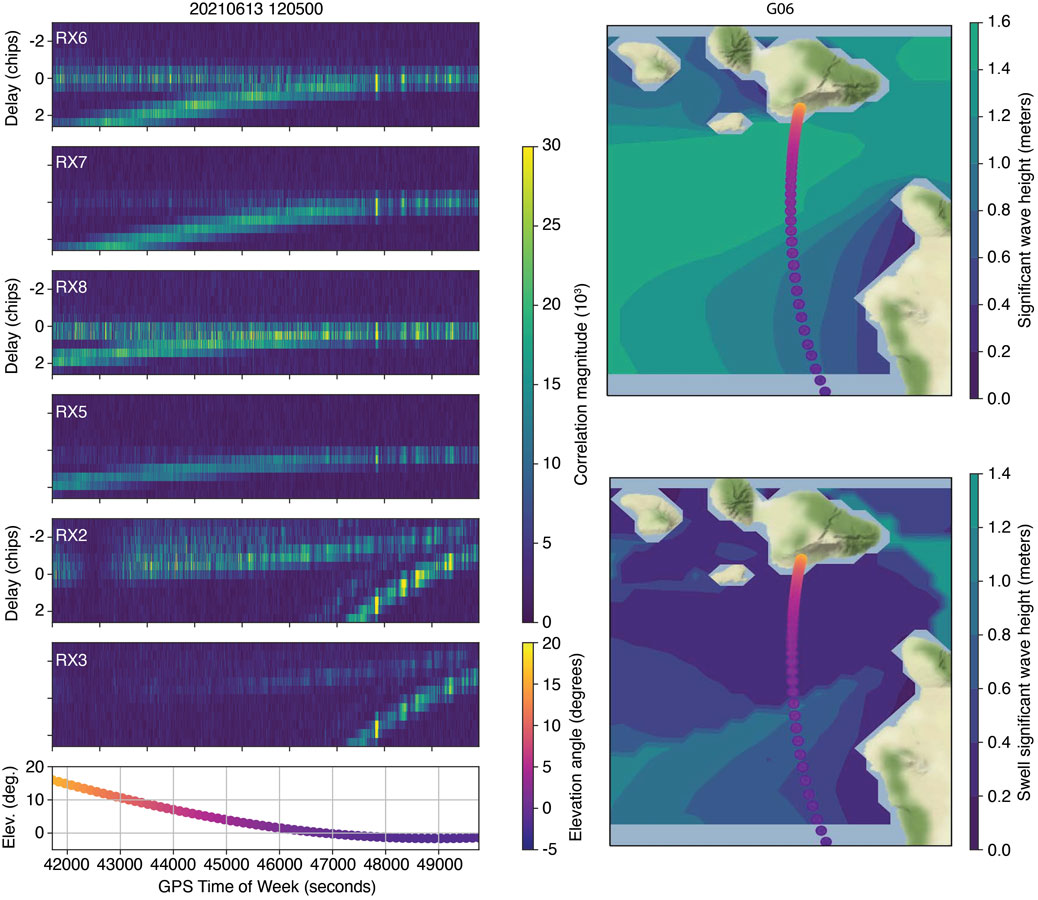
Starting in June 2021, periodic collections were taken for around one hour at a time, which is about the amount of time it takes for a GPS satellite to pass from an elevation angle of 0 degrees to one of more than 20 degrees. The collection times were adjusted to target the passes of satellites whose specular reflection point passed within the azimuthal range of the horn antenna, which faces roughly to the south and has a beam width of around 60 degrees. FIGURE 2 summarizes the available datasets from the first month of collections. The right-most panels of FIGURE 3 show examples of the specular track for GPS PRN 6 as it sets over the horizon on June 13, 2022, at around 12:00-13:00 UT. This is the pass on which we focus in this work, since PRN 6 transmits the L1CA, L2C and L5 signals and consistently had a specular point in our region of interest.
Figure 2: Available data during the first month of collections. The average significant wave height in the region south of Haleakalā is also plotted. Numbers near the bottom indicate the datasets analyzed for this article.
METHODOLOGY
Our processing method for open-loop tracking of the reflected GNSS signals is based on our previous work in which we produced DDMs and delay maps of the signal-to-noise ratio (SNR) measurements for multiple signal frequencies and received polarizations.
Pseudorange Model. We start by generating a model of the pseudorange for both the direct and reflected signal. The model only needs to be accurate down to the chip level, since we correlate across several chips of delay for the received signals. Setting a somewhat arbitrary accuracy requirement of 0.5 chips (equivalent to a delay of around 150 meters for L1CA/L2C or 15 meters for L5 signals), allows us to ignore path delays from the ionosphere and troposphere, which should only account for up to several meters of delay. The model has three terms that we estimate relative to GPS System Time (GPST): the receiver clock error, the satellite transmitter clock error and the geometric range. We use a surveyed position of the horn antenna along with International GNSS Service precise orbit and clock products for the transmitter clock error and positions. These allow us to compute the transmitter clock error and path delay for the direct signal. The reflected signal path delay can be found by computing the specular reflection point on the WGS84 ellipsoid and adding the distances from the transmitter to the specular point and the specular point to the receiver. The remaining term to estimate is the receiver clock error. Recall that our USRPs are driven by the Septentrio internal oscillator. Therefore, the clock error in Septentrio measurements is associated with variations in the reference oscillator for the USRPs. We utilize a geodetic detrending technique to estimate these clock variations and apply them to our pseudorange model. To construct the full receiver clock error, we estimate the time-alignment of the samples near the beginning of the collections to GPST by tracking one minute of a strong, mid-elevation-angle satellite and decoding its timing information. This provides us with an estimate of GPST at the start of the file, which we can use to construct a full estimate of the GPST at any sample in the file. Also, given our pseudorange model, we can find the received code phase and the Doppler frequency.
Figure 3: Example of delay maps from GPS PRN 6. The panels to the left show delay maps for the L1CA, L2C and L5 signals, both RHC and LHC polarizations. The bottom panel shows the corresponding elevation angle over the duration of the pass. The maps to the right show the specular point location during the pass, along with a contour of the WW3 model for significant wave height and swell-significant wave height.
Signal Correlation. Using the established code phase and Doppler models, we generate correlations for both reflected and direct signals. We correlate a reference signal over each 1-millisecond interval, and for sanity-checking purposes, we compute correlations over ± 3 chips at 0.5 chip spacing. This results in in-phase and quadrature (I/Q) correlation outputs every 1 millisecond. The left panels in Figure 3 show examples of the processed reflected signals for RHC and LHC polarization L1CA, L2C and L5Q signals from PRN 6 on June 13, 2021, at 12:00-13:00 UT. Note that as the satellite sets, at around 4 degrees elevation angle, the reflected signals merge with the stronger direct signal on the L1 and L2 signals. This happens later on L5 due to its higher bandwidth. We use the 0.0 chip bin to obtain I/Q outputs for carrier-phase processing for L1 and L2. For L5, we use the 0.0, -0.5, or -1.0 chip bin to account for model mismatch toward the end of the file.
Signal Fading and the WW3 Ocean Model. An eventual goal of the Haleakalā reflectometry experiment is to compare the characteristics of processed reflected signals with the ocean surface parameters near the specular point and glistening zone. To this end, we have incorporated data from the Hawaii regional WaveWatcher 3 (WW3) model. The model outputs information about wave height, direction and period due to both wind and swell, and has a resolution of around 5 kilometers. The data from this model is available in NetCDF format from several web services. The right panels of Figure 3 show contours of the wind- and swell-significant wave height in the South Haleakalā region. Meanwhile, note that the reflected signals (left panels) show high variability in the received power throughout the duration of the collection. While we hoped to be able to immediately observe a correlation between these wave parameters and the power fluctuations, it is clear that we need additional processing to tease out such a signal, and the changing satellite geometry will likely make this difficult to observe and validate. Even still, our results at the end of this article will show that there is likely some correlation between fading and wind parameters, though to what extent is unknown. Finally, note that the LHC polarizations (RX6, RX8, RX2) show much stronger reflected signals than the RHC polarizations. Since we are interested in processing the phase for the reflected signals, we report exclusively on the use of the LHC polarization signals in the rest of this article.
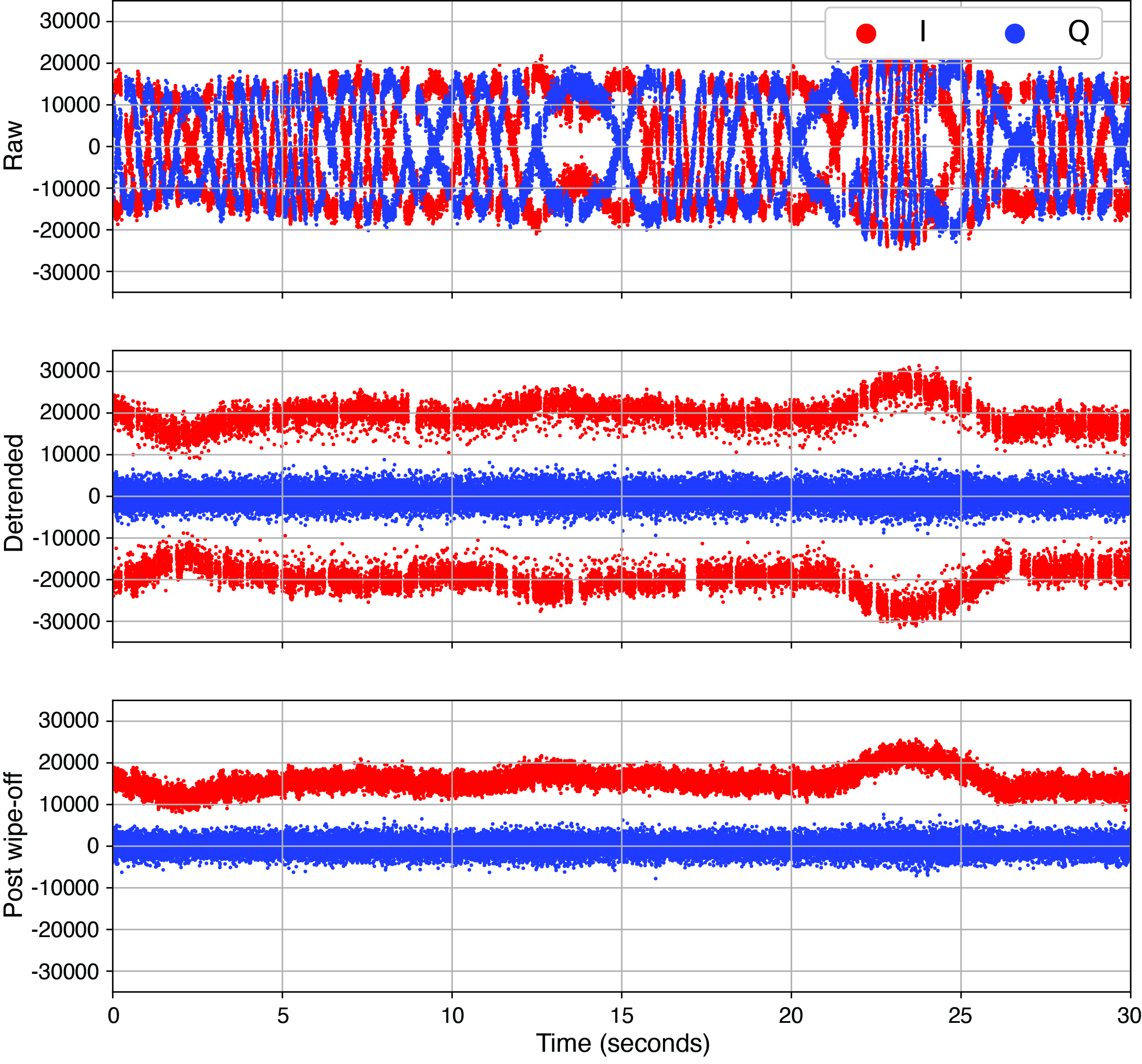
Carrier-Phase Processing. Once the correlations are performed, we take the I/Q correlations for both direct and reflected signals and process them to retrieve the cleaned reflected signal phase. The first series of steps in this process involve processing the direct signal to determine navigation / overlay symbol alignment and to estimate any residual phase fluctuations, which are mostly due to unmodeled receiver clock fluctuations. FIGURE 4 illustrates this process for the L1CA signal. The raw I/Q correlations are shown in the top panel. To these we apply a Costas phase-lock loop (PLL) to track the residual phase fluctuations without being sensitive to navigation / overlay symbol transitions. Next, we remove these residual phase fluctuations to obtain the detrended I/Q values.
Figure 4: The I/Q data cleaning process for the L1CA direct signal.
As shown in the second panel, these quadrature components of the detrended I/Q values are centered at zero while the in-phase component now shows the data bits / overlay symbols. We use the detrended I/Q values to estimate the navigation bit sequence on the L1CA and L2C signals. Likewise, we estimate the alignment of the Neumann-Hoffmann overlay sequence for the L5 signal. Finally, we wipe off the estimated data bits or overlay sequence to verify the procedure. The results of wiping off the estimated navigation bits for the L1CA signal are shown in the third panel of Figure 4.
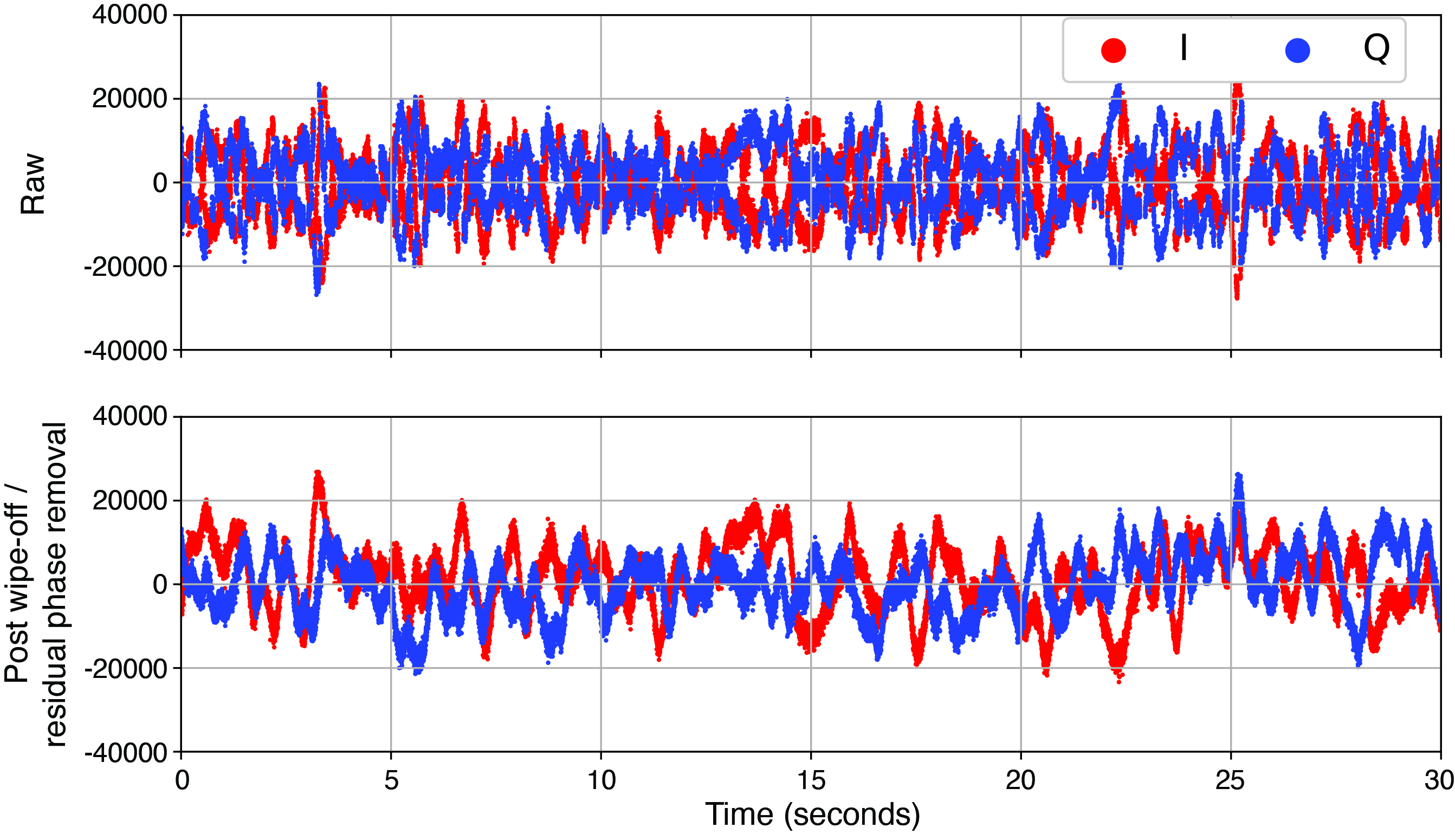
Having obtained the residual phase fluctuations and navigation / overlay symbols for the direct signal, we next apply these to clean up the reflected signal. Specifically, we remove residual phase fluctuations from the raw reflected signal I/Q values and then wipe off the corresponding navigation bits or overlay code. FIGURE 5 shows an example of the reflected I/Q data before and after this procedure. The navigation bits are clearly removed, but the reflected signal still shows fairly significant fluctuations in the cleaned I/Q values. It is from these values that we hope to extract the residual reflected signal phase.
Figure 5: The reflected signal raw I/Q (top) and the I/Q after detrending and wiping off navigation bits for the L1CA signal.
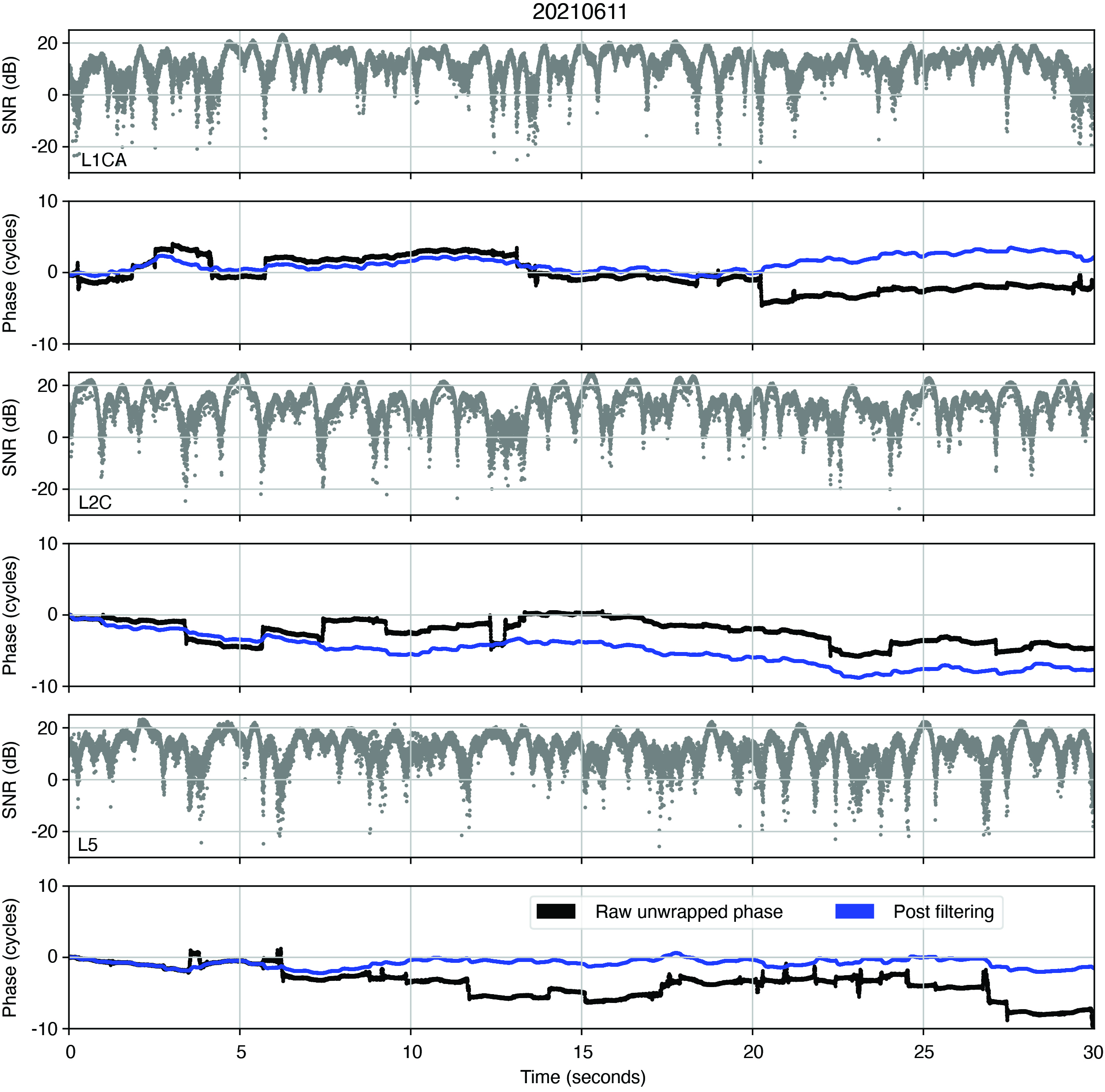
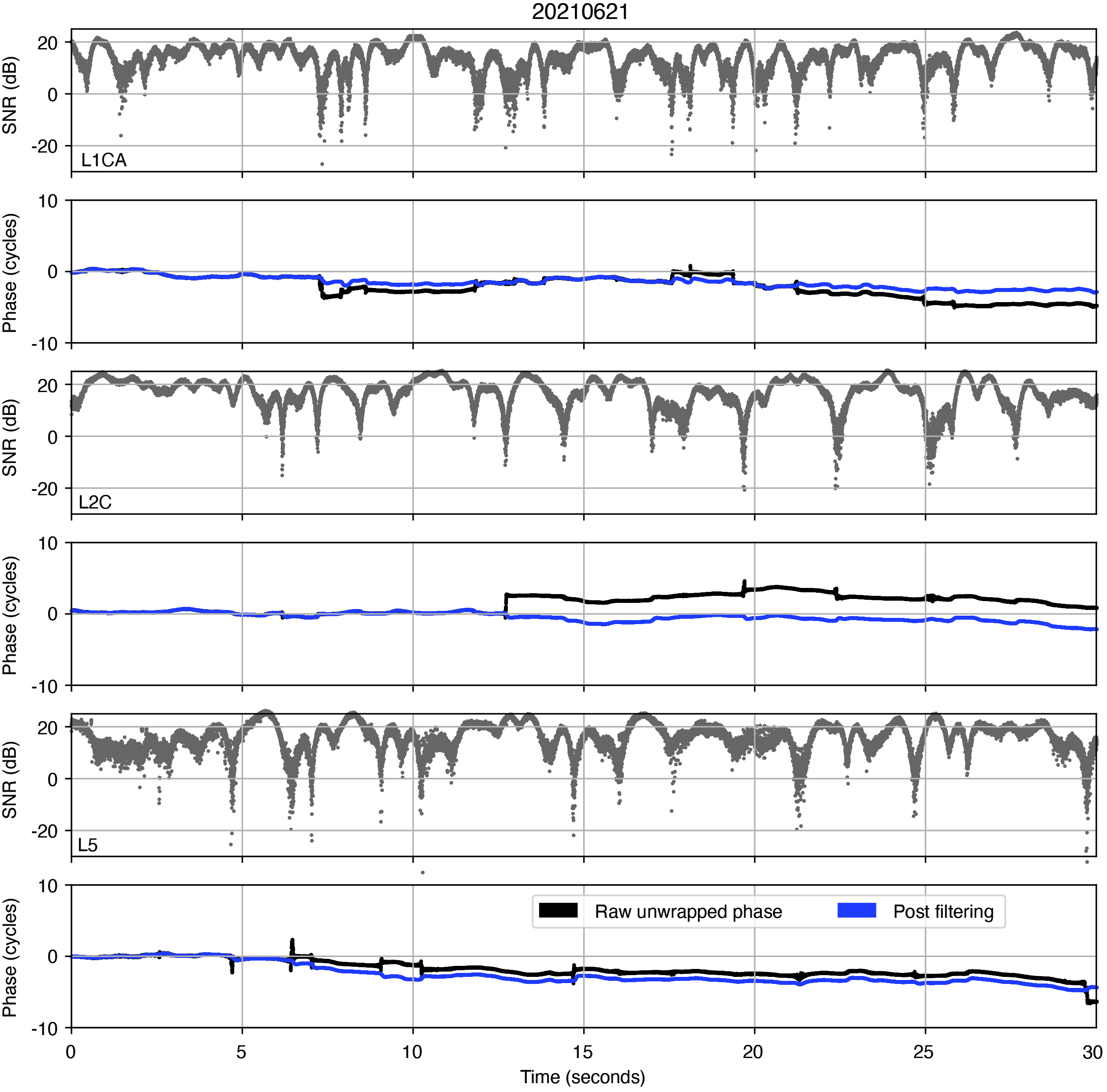
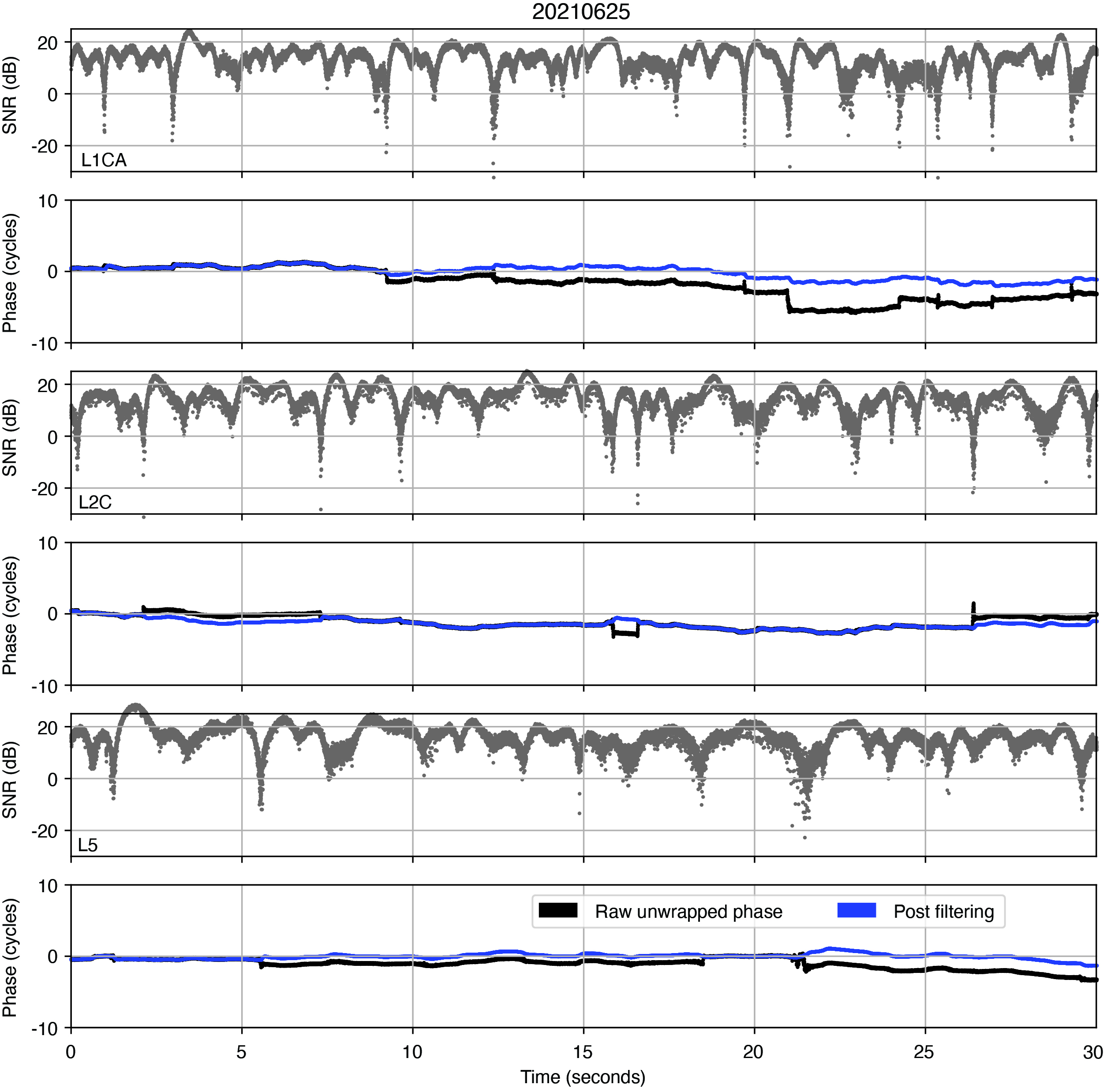
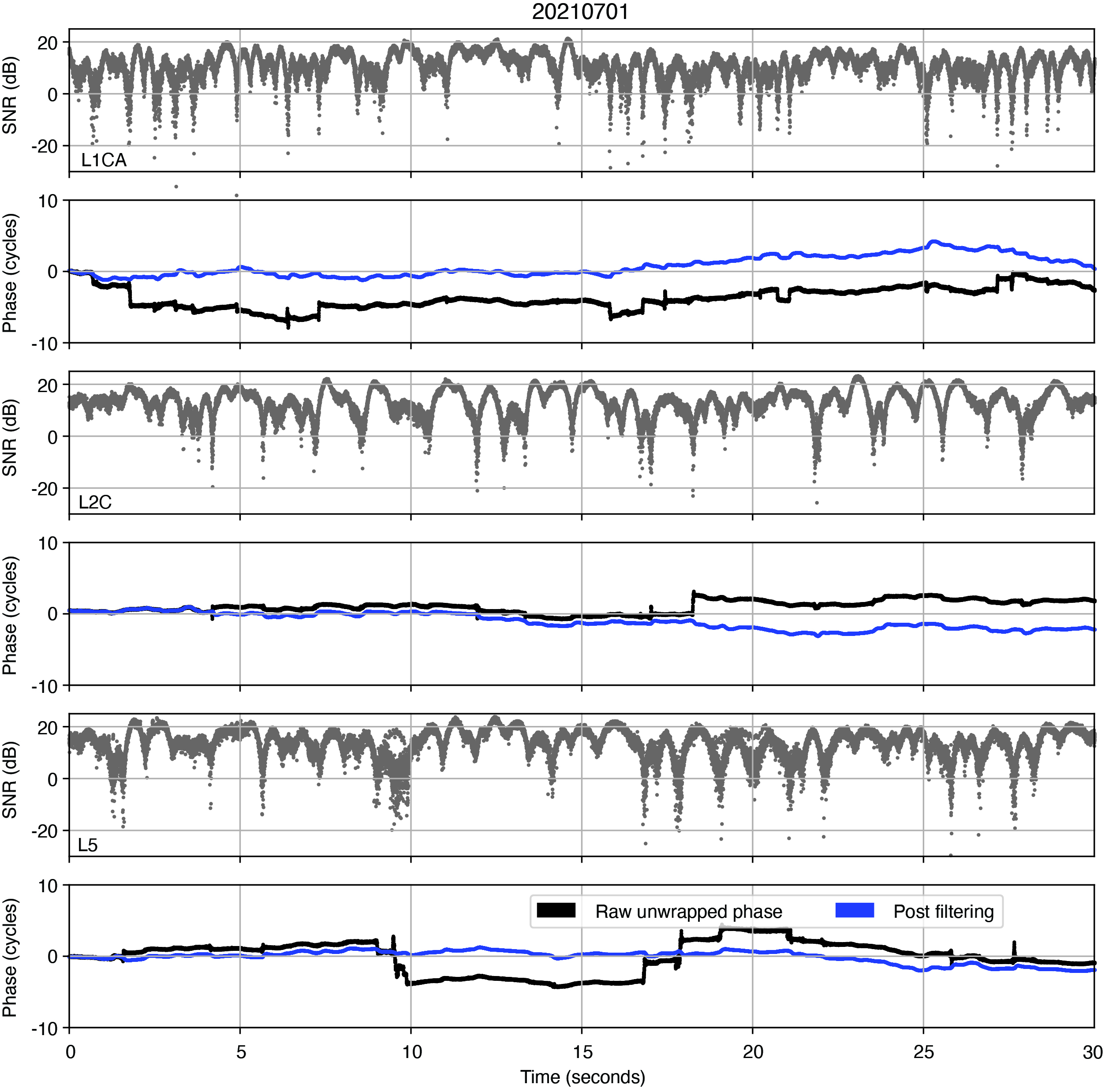
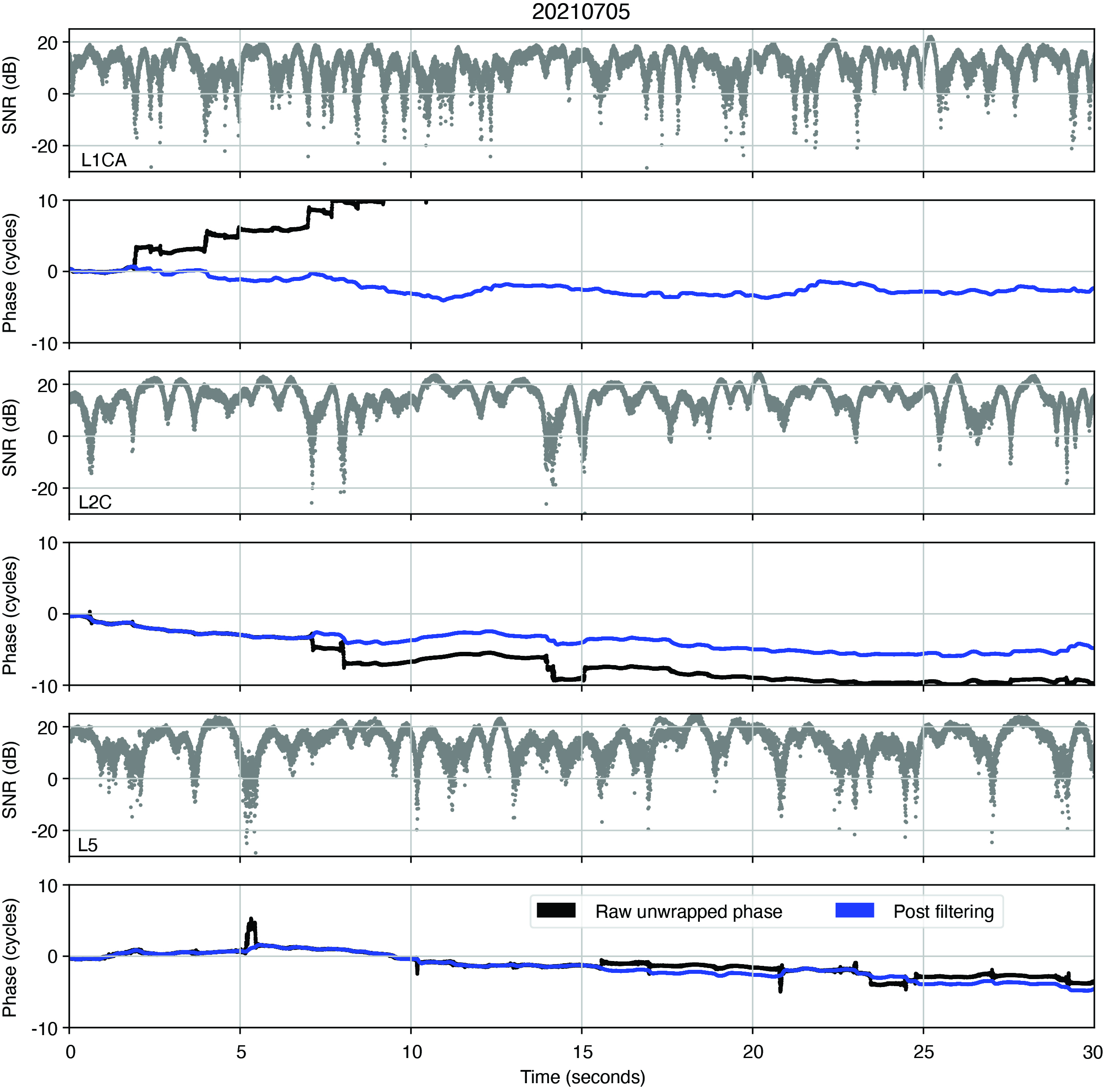
Under coherent conditions, the phase of the clean reflected I/Q data should contain only the unmodeled effects, including any signature of ocean surface height variation. However, the effect of multipath due to the rough ocean surface causes fluctuations in the received signal amplitude and phase, and can additionally cause cycle slips when we unwrap the phase. To filter out these cycle slips, we apply our simultaneous cycle slip and noise filtering (SCANF) method, which is essentially just a Kalman filter PLL with an additional step that tries to estimate and remove cycle slips. The figures in the next section show the results of applying this entire procedure to the reflected signals. The black and blue lines show the phase before and after applying SCANF. The reflected signal I/Q SNR is also included for reference. Note how the jumps in the black line coincide with SNR fades, and the blue line effectively recreates the phase trend of the black line without these jumps. This is good qualitative evidence that the SCANF algorithm was effective.
RESULTS
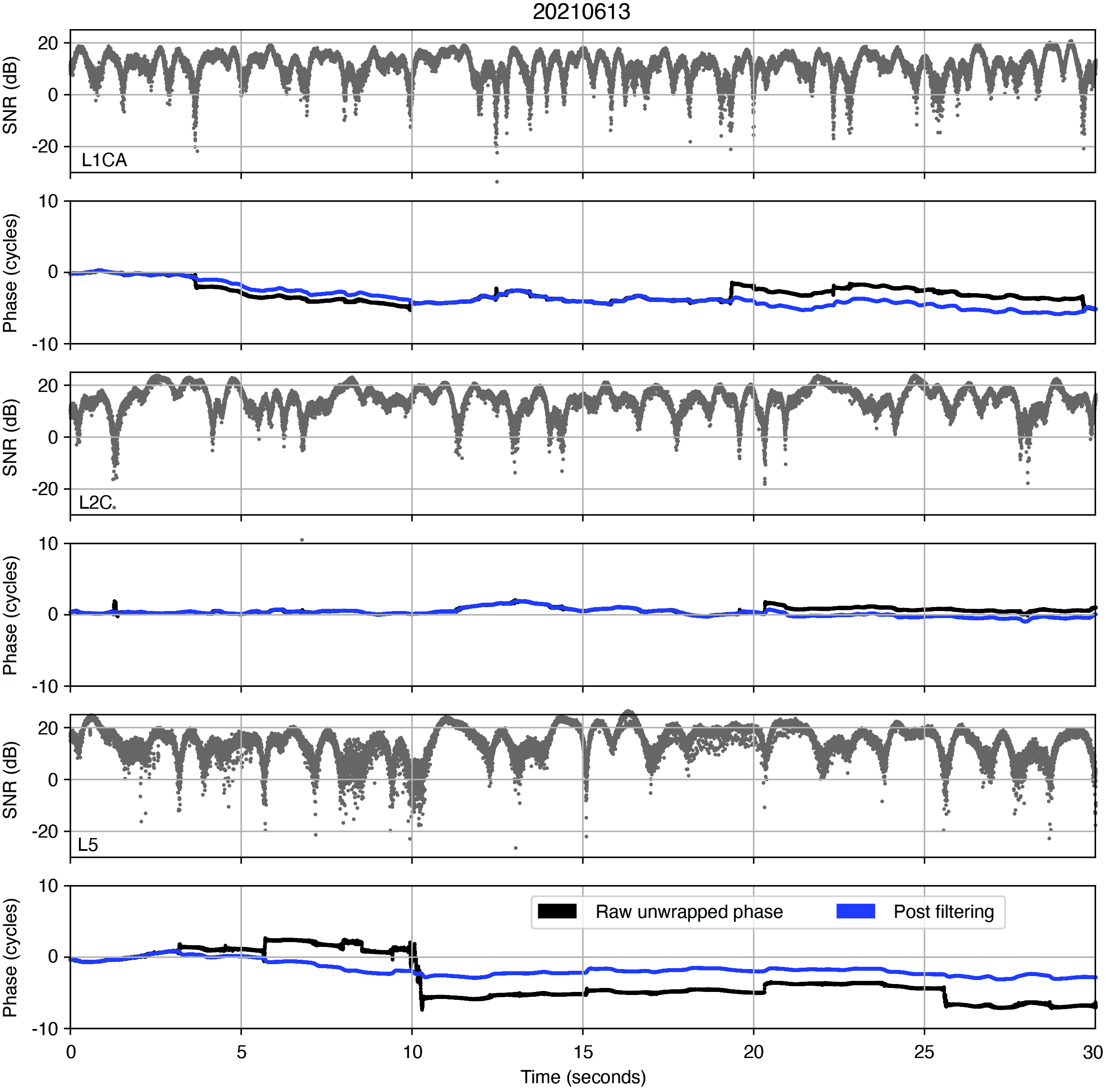
FIGURES 6, 7, 8, 9, 10, and 11 show the reflected signal SNR and phase for GPS PRN 6 on 6 different days. Note that these days correspond to the marked days in Figure 2, from which we observe that the wind-significant wave height is relatively high on days 1, 5, and 6, moderate on days 2 and 3, and relatively low on day 4. We noticed that the SNR fluctuations on days 1, 5, and 6 are comparatively more frequent than on other days, which we believe may be a signature of the ocean surface conditions. A more detailed analysis of this result is a topic for our future work.
Figure 6: Reflected signal residual phase before (blue) and after (black) applying the SCANF filtering for the June 11, 2021 dataset. Amplitude and phase are shown in alternating panels for L1CA, L2C and L5 respectively.Figure 7: Phase processing results for June 13, 2021.
Overall, we observe that the phase trend is not consistent across the three signals (L1CA, L2C, L5) for any of the days. With all the multipath signatures in the cleaned reflected signal, it was uncertain whether the extracted phase will be useful for applications such as ocean surface altimetry, and these qualitative results suggest that they probably will not be. However, season and hours of the day that were processed for our work discussed in this article are very limited. It is possible that processing more data will shed further insight onto whether the reflected signal phase is usable in this experiment.
Figure 8 Phase processing results for June 21, 2021.Figure 9: Phase processing results for June 25, 2021.
ACKNOWLEDGMENTS
The Haleakalā data collection system has been established with support from the University of Hawaii Institute of Astronomy, and the Air Force Research Laboratory. The authors appreciate the assistance from Michael Maberry, Rob Ratkowski, Daniel O’Gara, Craig Foreman, Frank van Graas and Neeraj Pujara. This research is funded by a subaward from the National Oceanic and Atmospheric Administration through the University Corporation for Atmospheric Research to CU Boulder and with partial funding support from the NASA Commercial Smallsat Data Acquisition program.
This article is based on the paper “Initial Carrier Phase Processing for the Haleakala Mountaintop GNSS-R Experiment” presented at ION ITM 2023, the 2023 International Technical Meeting of the Institute of Navigation, Long Beach, California, Jan. 23–26, 2023.
Figure 10: Phase processing results for July 1, 2021.Figure 11: Phase processing results for July 5, 2021.
BRIAN BREITSCH is a postdoctoral fellow at the University of Colorado (CU) Boulder, where he received his Ph.D. in aerospace engineering sciences. JADE MORTON is a professor in the Ann and H.J. Smead Department of Aerospace Engineering Sciences and the director of the Colorado Center for Astrodynamics Research at CU Boulder.
Trimble has partnered with HALO Trust, a landmine-clearing non-profit organization, to help expand its demining operations across Ukraine.
The grant from the Trimble Foundation Fund will focus on strengthening the HALO Trust’s ability to locate and remove landmines, unexploded ordnance and other explosive hazards from civilian areas to create safer communities. In addition, it will allow HALO to support the Ukrainian national authorities in planning and coordinating landmine clearance activities by streamlining the mapping and data flow from the operational teams in the field to the national database.
The Russian invasion of Ukraine has left areas of the country contaminated with landmines, unexploded ordnance and improvised explosive devices. These hazards block access to farmland, impede reconstruction efforts, prevent displaced persons from returning to their homes and continue to hinder the safety of Ukrainian civilians. The Ukrainian government estimates that 174,000km2 of the country’s land may be contaminated.
More than a thousand HALO staff members are active daily, both to clear explosives in critical priority areas and to recruit and train hundreds of new staff members to help keep communities safe from dangerous weapons left behind.
Surveying and mapping technology has played a significant role in the success of HALO’s operations around the world, including in Ukraine. Over the last six years, Trimble R1 and Trimble R2 GNSS receivers along with Esri ArcGIS Survey123 software have been used by HALO to identify and clear landmines.
Trimble’s Geospatial and Positioning Services businesses provided HALO with a new deployment of 255 high-precision Trimble DA2 GNSS receivers with Trimble Catalyst corrections service, allowing HALO to modernize and transform its landmine clearance operations by providing improved accuracy for more detailed maps, streamlined data flows and increased operational efficiency and safety.
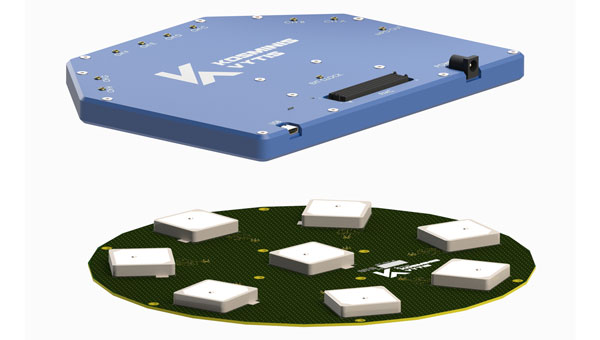
Kosminis Vytis has released two anti-jamming receivers, the KV-AJ3 and KV-AJ3-A, and an 8-channel, controlled reception pattern antenna (CRPA), anti-jamming development kit.
Image: Kosminis Vytis
The KV-AJ3 tri-band anti-jamming receiver combines a digital antenna control unit (DACU) and a GNSS receiver. KV-AJ3 can be used as a jamming protector for legacy receivers or as a stand-alone GNSS receiver solution.
When used with a Kosminis Vytis multi-band 4-channel antenna array, anti-jamming DACU uses the Null-Steering algorithm based on classic auto-compensator architecture and channel equalization, which eliminates the jamming signals from those processed by the receiver.
The tri-band solution decreases interferences from up to three directions in three frequency bands, including S-band, according to the company. This approach is designed to provide significantly higher protection against interference compared to single-frequency devices.
The receiver has a digital port for navigation data output. Jamming-free RF signals can also be delivered to external non-protected GNSS receivers to obtain position, velocity and time.
KV-AJ3 contains a MEMS inertial sensor, which allows for GNSS-aided INS solutions where coordinates and attitude angles are required.
Image: Kosminis Vytis
The KV-AJ3-A is designed to provide a stable navigation signal in three frequency bands, including S-band, even in the presence of jamming and other harsh conditions. The technology is MIL-STD compliant and meets the EMI/EMC requirements for avionics.
The direction to interfering signals is determined using a phased array antenna, which can then remove jamming signals from up to three directions. The original signal is either restored and delivered to external GNSS receivers or processed by the internal receiver to obtain position data. The device can be used as a DACU for legacy receivers, or as a stand-alone GNSS receiver solution.
According to Kosminis Vytis, the key components of this anti-jamming device are based on custom ASICs that allow users to achieve high jamming suppression and SWaP. KV-AJ3-A can be used for fixed installations and land, sea and air platforms, including UAVs.
Image: Kosminis Vytis
The 8-channel, CRPA, anti-jamming development kit is a set of instruments designed to help users add anti-jamming and anti-spoofing capabilities to their receivers.
The main development tool is NT1069x8_FMC — an 8-channel receiver board. The 8 coherent channels are based on NT1069, the RF application-specific integrated circuit (ASIC) that supports a high dynamic range of input signals.
Each channel performs amplification, down-conversion of GNSS signal to intermediate frequency (IF) and subsequent filtering and digitization by 14-bit ADC at 100 MSPS.
The board is compatible with GPS, GLONASS, Galileo, BeiDou, NavIC (IRNSS) and QZSS signals in L1, L2, L3, L5 and S bands. Each RF channel has an individual RF input with the option to feed power to an active antenna.
The board also has an embedded GNSS receiver and an up-converter, or modulator, which can provide connection to an external GNSS receiver.
Under a technology license, Kosminis Vytis provides users interested in developing their solutions based on the NT1069 chip with a reference design of anti-jamming receiver, anti-jamming algorithms and software tools for the development and evaluation of anti-jamming receivers.
Other than the tracked unit — a truck that appears to be a power generator and has an overall look of complexity — the thing that jumps out at you about the Russian Pole-21 jammer is that it is brisling with a huge number of antennae. The system apparently can jam almost any known communication channel and everything GNSS. It is a bit lumbering to move around, may be difficult to set up, and must be used judicially, because it may jam everything, including the Russian’s own coms and GLONASS navigation systems. So, it may be useful for disabling the enemy, but only when your own soldiers have already established visual contact with their target.
The Russians just parked one of these contraptions in southern Ukraine’s Zaporizhzhia Oblast (district), which has been the focus of the Ukrainian counteroffensive for the last few months. However, the Ukrainians found it quickly, had time to figure out what to do with it and launched a GPS-guided weapon that destroyed the inoperative Pole-21 jammer. They may have caught the system either before it was fully activated or when it had been intentionally shut down to protect Russian forces. The Pole-21 set up was found during a drone recognizance flight and the system was then taken out by a Ukrainian aircraft — perhaps a Russian Sukhoi Su-27 or Mikoyan MiG-29 — which deployed a U.S. Joint Direct Attack Munition (JDAM) to destroy the system. The UAV, the aircraft, and the JDAM all use GPS for guidance, which is perhaps a little ironic. The Ukrainians have reportedly destroyed more than four dozen other Russian jamming systems since the start of the war.
Just in case there might be reprisals, the Ukrainians have developed their own RF system that forms a 600-ft dome over the area/asset that needs protection from UAV attacks. Additionally, Western countries have supplied several jamming systems to the Ukrainian forces for more elaborate, wider range jamming protection.
Ukraine initially shot down low flying, slow Russian UAVs with rifles and large caliber anti-aircraft defense systems; however, as expensive missile systems have become available from the United States and elsewhere, it has become apparent that it is too expensive to use complex missiles to bring down large numbers of inexpensive commercial UAVs. It just does not make sense — too many UAVs and not enough expensive missiles. Ukraine has thrown large numbers of cheap UAVs — some even made from cardboard — in the other direction, at a significant cost for the missiles shot at them by Moscow’s air-defense system.
Counter-UAV (C-UAV) technology must be an alternative, and several suppliers can readily provide affordable production equipment. Tactics range from firing anti-aircraft gun batteries to intercepting drones using nets, or just crashing UAVs into interlopers, or more prevalently using electronic disruption systems — such as the DroneGun Tactical “arm-held” from DroneShield — which jams the control signals and/or GNSS guidance.
A large proportion of “attack-UAVs” are simply modified off-the-shelf commercial vehicles adapted to carry explosives, even existing conventional ordinance — read “bombs”. The UAVs themselves are built with commercial components, which have little resistance to directed jamming frequencies that overpower the RF section of the receiver. Then, there is loss of lock on the coms and/or the very low power GNSS signal — where signal processing stops, and guidance is lost.
Meanwhile, back in our much safer land of commercial aviation, progress toward the emergence of electric vertical take-off-and-landing (eVTOL) air taxis took a simple step forward, at Tampa International Airport (TPA), Florida.
TPA growth plan of the Tampa airport. (Image: FAA)
TPA is in the midst of a significant growth spurt that began last year with moving the rental car facility off site to make more space and installing a rail link to restore access for renters to the main terminal. Upcoming is a new Airside D set of 16 additional gates, and future provisions for urban air mobility, enabling eVTOL air taxi traffic services in and around the airport to bring passengers directly to the airport from their local catchment areas. Possible locations have been identified for one or two vertiports on the airport grounds, and an airport integration plan appears to be well underway.
Last week, Volocopter, a German company, showed up at TPA with its VeloCity two-seater prototype air taxi to carry out the very first tests of a passenger-carrying UAM vehicle at a major U.S. airport. The Tampa and St. Petersburg mayors were on hand, as were airport management and others from the aviation and transportation industry.
VeloCity prototype in clear skies at Tampa. (Image: courtesy of courtesy BoxAdmin/Beau Zimmer/Velocopter)
Now TPA is a busy place, with 553 flights daily into and out of the facility, but Volocopter was able to fit into the infrastructure and perform two flight tests with the U.S. Federal Aviation Administration (FAA) to investigate aircraft downwash and outwash, along with aircraft performance in TPA’s actual environmental conditions.
Various prototypes of the VoloCity have already flown 2,000 flights. Initial operational flights will be flown by a pilot with only one passenger. However, as operational reliability is proven, a fully autonomous service is planned. Volocopter is currently focusing on certification of the VoloCity, by the European Union Aviation Safety Agency (EASA) in 2024, leading to initial service on three routes in Paris, France. Concurrent validation in cooperation with the FAA, originally submitted in 2020, is also progressing.
In conclusion, GNSS and communications jamming is escalating in and around Ukraine as the war drags on and each side tries to compensate, while efforts to revolutionize shuttle services for passengers to and from major airports in the United States has taken quite positive steps in Tampa, Florida.
Skydio has entered a strategic collaboration with Trimble to create an integrated workflow of accurate data capture, visualization and analytics. The workflow is designed to address the needs of critical infrastructure industries such as surveying, mapping and inspections.
The collaboration, currently in the developmental stage, aims to offer users centimeter-level accuracy in surveying and mapping projects by integrating Skydio autonomous UAVs with Trimble GNSS receivers and software. The technology can be used by construction and utility companies, as well as state transportation agencies, to streamline workflows for greater precision and project efficiency.
Industry leaders rely on autonomous UAVs with powerful visual and thermal camera sensors, such as Skydio’s X10, for their ability to capture real-time condition reports of critical infrastructure conditions. By capturing images and geospatial data early and frequently throughout construction projects, organizations can easily ensure on-site work matches the design and reduce costly rework.
When bridge or utility site inspections need to scale, the Skydio and Trimble integration can be used to collect comprehensive data and improve the necessary workflow to identify issues early and take action to prevent failures.
According to Skydio, key benefits of the collaboration include:
Automated data integration: An automated, API-based integration enables seamless transfer of aerial imagery and metadata from Skydio Cloud to Trimble Industry Cloud. It accelerates the conversion of reality-capture data into actionable insights to improve efficiency. Further refinement and analysis of the output data can be carried out in professional surveying and mapping environments such as Trimble Business Center (TBC).
Survey-grade accuracy with Skydio X10: The X10 UAV will be fully compatible with Trimble’s GNSS receivers, allowing mutual users to achieve survey-grade accuracy in mapping missions when employing Skydio alongside Trimble’s base stations and GNSS receivers. Beyond RTK, users will also be able to conduct PPK based corrections post-flight.
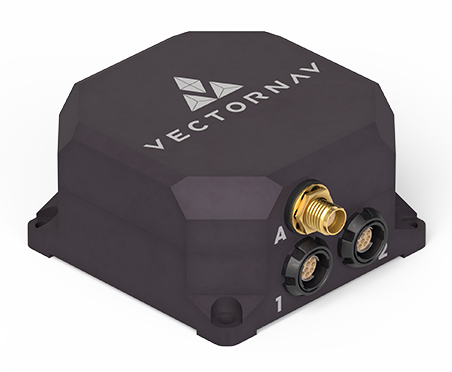
VectorNav Technologies has released two products, the VN-210-S and VN-310-S, which expand its tactical series of GNSS-aided inertial navigation systems (INS).
The VN-210-S GNSS/INS combines a tactical-grade inertial measurement unit (IMU) comprised of a 3-axis gyroscope, accelerometer, and magnetometer with a triple-frequency GNSS receiver. The integrated 448-channel GNSS receiver from Septentrio adds several capabilities, including L5 frequencies, moving baseline real-time kinematic with centimeter-level accuracy, support for Galileo OSNMA and robust interference mitigation.
These capabilities and high-quality hardware offer improved positioning performance in radio frequency-congested and GNSS-denied environments.
Image: VectorNav
The VN-310-S dual GNSS/INS leverages VectorNav’s tactical-grade IMU and integrates two 448-channel GNSS receivers to enable GNSS-compassing for accurate heading estimations in stationary and low-dynamic operations. The VN-310-S also gains support for OSNMA and robust interference mitigation, offering reliable position data across a variety of applications and environments.
The VN-210-S and VN-310-S are packaged in a precision milled, anodized aluminum enclosure designed to MIL standards and are IP68-rated. For ultra-low SWaP applications, VectorNav has introduced L5 capabilities to the VN-210E (embedded) when using an externally integrated L5-band GNSS receiver.
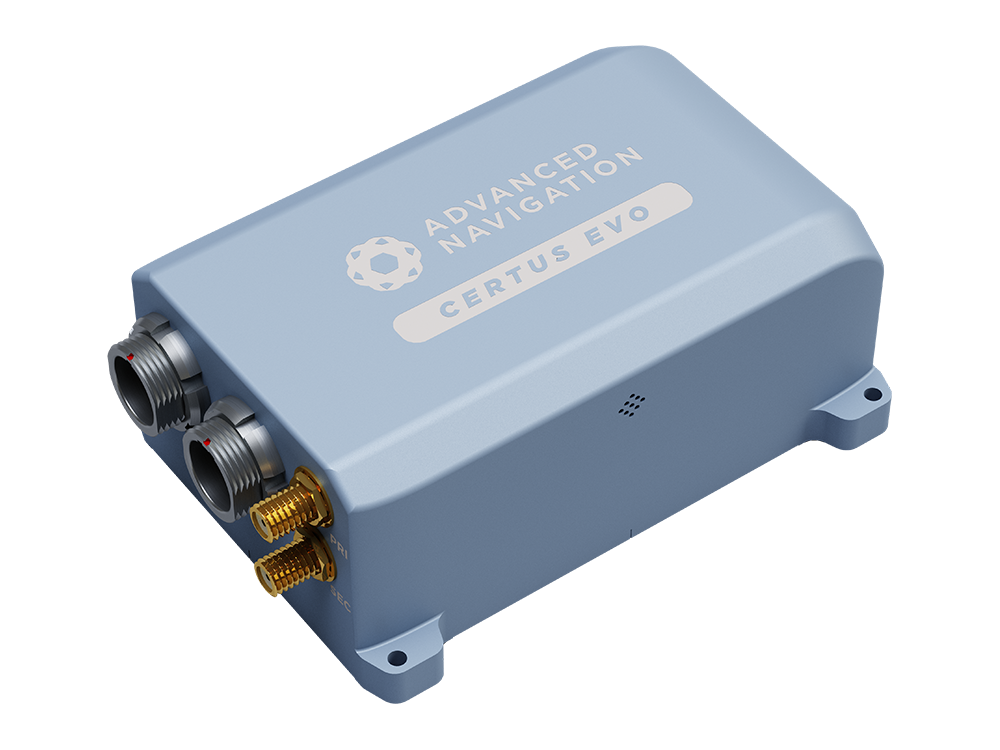
For demanding applications where precise navigation really matters and where size, weight and power are at a premium, Certus Evo exceeds the accuracy of many fibre optic gyroscopes while providing a very compact, lightweight and low power solution. This makes it ideal for applications such as aerial surveys where high performance is required and where flight times can be extended by minimising component weight and power consumption. The AI-based fusion algorithm takes full advantage of high-accuracy MEMS accelerometers and gyroscopes to deliver dependable performance at an affordable price point. Integration or customisation is made easy with extensive connectivity options and access to world-class technical support.
The European Union is in the final stages of completing a deal with SpaceX to launch four Galileo navigation satellites in 2024, reported SpaceNews.
In press briefings during the European Space Summit in Seville, Spain, Thierry Breton, the European Commission’s commissioner for the internal market, said that he was “finalizing the discussions” for a pair of Falcon 9 launches, each carrying two Galileo satellites, tentatively scheduled for April and July of 2024.
Brenton also said that the final obstacle to completing the launch contract was negotiating a security agreement to protect sensitive technologies on the Galileo satellites, which previously had been launched from the European spaceport in French Guiana, when those satellites are being prepared for launch from the United States.
The launch contract itself was completed in July, Breton noted, and that the European Commission had approved a European Space Agency proposal to use the Falcon 9 for launching those satellites. He said the European Commission would spend $192 million on the Falcon 9 launches.
During a recent meeting of the European Space Agency (ESA) Council, ESA Director General Josef Aschbacher said that the final decision for using SpaceX to launch the Galileo satellites was in the hands of the Commission.
“We have prepared on the ESA side the contractual arrangements with an external launch company, but whether or not the launch will be decided to take place with SpaceX is not in our hands,” he said. “the European Commission will decide.”
There had been discussions for more than a year about using a non-European rocket, such as the Falcon 9, for launching those satellites because of delays in the Ariane 6, the retirement of the Ariane 5 and the withdrawal of the Soyuz after Russia’s invasion of Ukraine. Those satellites would augment the existing operational Galileo constellation and serve as on-orbit replacements if other satellites fail.
ESA had already contracted with SpaceX for three Falcon 9 launches. The ESA said it chose the Falcon 9 after the loss of the Soyuz, delays in the Ariane 6 and concerns about the Vega C, which remains out of service since a launch failure in December 2022.
Belgian government-owned railway company, Infrabel, is responsible for ensuring that the country’s railway systems run smoothly. To do this, the company recently needed to renew the switches and crossings at the Kinkempois site, located in the Liege region of the country.
To ensure an efficient, safe and high-quality changeover, Infrabel partnered with construction specialist Jérouville, and when it came to choosing technology to help guide its machinery, the contractor turned to Topcon Positioning for its total station solutions.
According to Stéphane Lemaire, equipment manager at Jérouville, the team first dismantled and removed the previous set of foundations and the sub-foundations at Kinkempois. From there, the team installed new foundations to ensure the new switches have a good grounding for years to come.
At the site, navigation capabilities were compromised due to interference from overhead power lines. As a resolution, two Topcon total stations were used; one for each crawler dozer. Despite the challenging circumstances, the total stations were able to provide accurate readings for each dozer.
Before the bulldozers could get to work, surveyors used the data from the total stations to create three-dimensional models of the finished project using Topcon’s MAGNET software. These models were then shared with all stakeholders on the project. The MAGNET software allowed the entire team to have complete oversight of the project, whether they were on-site or back in the office.
Stéphane Lemaire said in a press release that Topcon’s total stations played a key role in getting the job done accurately on the first try.
“Traditionally, this has been a time-consuming process for projects like this, with a tracker on site who would manually ensure that the levels were correct,” Lemaire said. “However, with total station technology, the process only took three shifts across two weekends, compared to six shifts across two weekends.”
What is the most promising innovation in satellite navigation being introduced by BDS, Galileo, QZSS, or NavIC?
“Two things are having an immediate impact: authentication methods, such as Galileo’s Open Service-Navigation Message Authentication (OS-NMA), and the proliferation of correction services for high accuracy. Navigation message authentication offers a practical, easy-to-implement defense against several (though not all) types of spoofing attacks. QZSS and NavIC offer this too. And though paid correction services have been available for some time, Galileo’s High Accuracy Service (HAS) will bring it into the mainstream. Sometimes innovation is just applying simple techniques in a useful, efficient manner.”
For critical infrastructure, how good a remedy are multi-constellation receivers to GNSS vulnerability?
“Multi-constellation receivers do not do much to combat jamming and spoofing; they only detect failures in a constellation itself through comparison. Since they all are open standards, a good spoofer can fake all the systems simultaneously. Multi-frequency receivers are a bit more resistant to jamming, since one must jam multiple bands, but since all the bands are relatively close, the barrier is not high. To be truly resilient, you need diverse, redundant PNT sensors — IMUs, CRPAs, strong signals of opportunity, lidars, etc. — in addition to GNSS receivers.”
A roundup of recent products in the GNSS and inertial positioning industry from the November 2023 issue of GPS World magazine.
SURVEYING & MAPPING
MEMS IMU Suitable for rugged environments
The TAC-440 MEMS inertial measurement unit (IMU) is designed for demanding, mission-critical, rugged environments in a wide variety of defense, commercial, industrial, and marine applications. The TAC-440 features 1°/hr gyro bias and 1 mg accelerometer bias stability with 0.05°/√hr angle random walk over a wide temperature range. The solid-state quartz sensors and hermetically sealed IMU construction provide reliable MTBF and storage life, EMCORE stated. The TAC-440 supports four data message synchronization methods with either input synchronization pulse capability or an output time of validity capability. The user can choose whether the synchronization pulse is internally generated and output as a time of validity of the output data or whether the TAC-440 software will identify the synchronization pulse input and synchronize the output data to the input pulse. EMCORE Corporation, emcore.com
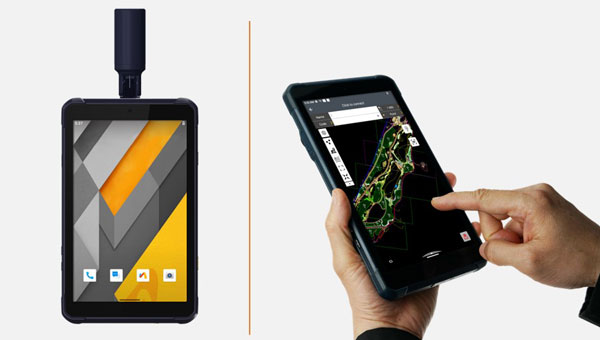
RTK GNSS Tablet A rugged device designed for geospatial and mapping operations in the field
The LT800H offers users robust outdoor performance, data security and centimeter-level accuracy for a variety of applications, including construction, environmental surveying and any industry in which Android tablets are used. Featuring a high-performance 1,408-channel GPS, GLONASS, Galileo and BeiDou module and a tracking GNSS helix antenna, the LT800H RTK Android tablet offers centimeter-to-decimeter positioning accuracy in challenging environments. It also comes equipped with a 4G modem to simplify connectivity to GNSS RTK network corrections. The technology also offers an eight-hour battery life, allowing users to collect data in the field uninterrupted. CHC Navigation, chcnav.com
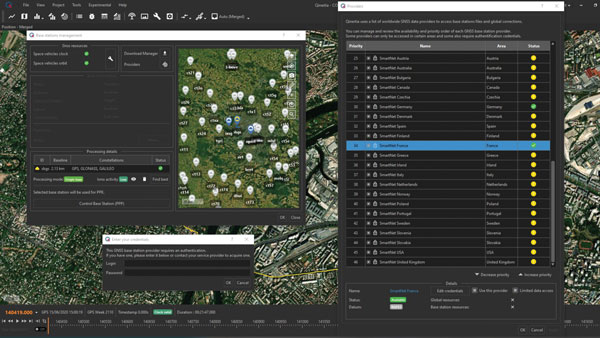
PPK Software For land surveying, hydrography, airborne surveys, construction, and applications that require precise positioning
The Qinertia 4 contains an enhanced geodesy engine that has an extensive selection of preconfigured coordinate reference systems (CRS) and transformations, making it a suitable solution for applications that use diverse geodetic data. To tackle the challenges of variable ionospheric activity, Qinertia 4 features an Ionoshield post-processed kinematic (PPK) mode. This feature compensates for ionospheric conditions and baseline distances, enabling users to perform PPK even for long baselines and/or harsh ionospheric conditions. This ensures surveyors can achieve centimeter accuracy even in regions with unpredictable ionospheric disturbances. Another addition to the Qinertia 4 is an extended network support for continuously operating reference stations (CORS). This feature gives users access to a network of 5,000 SmartNet CORS for reliable GNSS data processing. These base stations add to the network of base stations directly available in Qinertia, bringing the total to more than 10,000 bases in 164 countries.
For data that cannot be processed using PPK, Qinertia 4 offers an alternative solution with its tightly coupled precise point positioning algorithm. This new processing mode, available for all users with active Qinertia maintenance, provides post-processing anywhere in the world without a base station, with a horizontal accuracy of 4 cm and a vertical accuracy of 8 cm. SBG Systems, sbg-systems.com
Airborne Lidar + RGB System Designed to enhance the details of aerial mapping operations
The AlphaAir 10 (AA10) features a high-precision navigation algorithm that provides 5 mm repeated range accuracy and achieves absolute precision in the 2 cm to 5 cm range, even in complex environments. The AA10 is capable of long-range measurements of up to 800 m, rapid scanning at 500,000 points per second, and features a continuously rotating mirror that enables scanning speeds of 250 scans per second. The AA10 enables the creation of mesh models by generating high-quality point clouds. It is powered by a 45 MP orthographic internal camera that provides high-resolution image mapping textures for 3D model reconstruction with realistic point cloud colorization. The AA10 also supports automated reality capture and real-time data visualization accessible directly from the UAV controller. The AA10 lidar system is lightweight and compact, weighing 1.55 kg, and provides a 30 min operating time when integrated with UAVs such as the DJI M350. The system is also IP64-rated. CHC Navigation, chcnav.com
GNSS Receiver Designed for survey projects
The Reach RS3 is a GNSS receiver that features inertial measurement unit (IMU) tilt compensation and a dual-band radio for enhanced compatibility with third-party receivers. The Reach RS3 enables users to survey at large tilt angles while maintaining survey-grade accuracy. The multi-band receiver works both as a base and a rover and comes factory calibrated. The receiver offers versatile options to get corrections from continuously operating reference stations (CORS), another Reach device, or a third-party base, so users can mix and match real-time-kinematic (RTK) receivers in a fleet. Its NTRIP connectivity enables corrections from CORS, NTRIP service, or a GNSS receiver using Emlid NTRIP Caster. When connected over NTRIP, Reach works on a baseline of more than 60 km in RTK and 100 km in post-processed kinematic. Emlid, emlid.com
GNSS Receiver Includes Trimble ProPoint and delivers survey precision and productivity in the field
The R580 GNSS receiver enables professionals in surveying, mapping and GIS, civil construction, and utilities to capture centimeter-level positioning. With the Trimble ProPoint GNSS engine embedded, users can measure points in challenging environments, such as under tree canopy or near buildings, while EVEREST Plus technology can identify and remove unwanted multipath signals for improved accuracy and data confidence. Using the Maxwell 7 chipset technology, the receiver provides fast processing, anti-spoofing capability and the ability to track all available GNSS constellations. The R580 supports Trimble RTX correction services for RTK-level precision without the use of a local base station or VRS network wherever correction sources are available. The receiver can be paired with all current mobile devices on a variety of operating systems and platforms —from a Trimble handheld or controller to a modern smartphone or tablet. It can also be mounted on a pole, vehicle or backpack. Trimble, trimble.com
OEM
GNSS Module Supports L1/L5 GNSS bands from multiple constellations, including NavIC
The NEO-F10N positioning module is based on the u-blox NEO form factor and is equipped with u-blox F10 dual-band GNSS technology. The NEO-F10N supports L1/L5 GNSS bands from multiple constellations — including NavIC — to provide meter-level position accuracy in urban areas. Its firmware is upgradeable and configurable to support several applications such as the vehicle telematics and micromobility markets or industrial applications requiring meter-level position accuracy. The NEO-F10N improves position accuracy in urban environments with its enhanced resilience against multipath interference. By leveraging signals from both the L1 and L5 bands, this module achieves better accuracy than using the L1 band alone. Users currently employing receivers based on modules such as the u-blox NEO-M8 and NEO-M9, can migrate to the new NEO-F10N generation. The module enhances accuracy, reduces power consumption, and offers an alternative solution to users who do not want to deploy dead reckoning set-ups. u-blox,u-blox.com
Multi-Band GNSS Antenna Designed to enhance meter-level positioning solutions
The ANN-MB5 is a multi-band (L1/L5/E5a/B2a) GNSS antenna that is optimized for the u-blox F10 platform and enables precise, reliable, and robust positioning, even in challenging environments. The antenna features concurrent reception of multiple navigation systems, including NavIC. The ANN-MB5 has a compact design with a magnetic base. u-blox, u-blox.com
INS A product for mobile mapping, autonomy, and more
The xRED3000 inertial navigation system (INS) offers quad-constellation GNSS support for multiple applications. The INS weighs 20 g, making it suitable for aerial payloads. At 53.6 mm x 50.6 mm x 9.5 mm in size, it can be incorporated without drastically changing a user’s design. When in a GNSS-denied area, the xRED3000 provides a position accuracy of 0.5 m even after 60 seconds. It features gx/ix tight-coupling algorithms, which improve accuracy in urban canyons and speed up real-time kinematic reacquisition after temporary GNSS outages. The xRED3000 features lidar inertial odometry, which takes data from lidar in post-processing to reduce inertial measurement unit drift and improve accuracy in areas with poor or no GNSS signal. Additionally, embedded NTRIP makes it easier to get GNSS corrections. OxTS, oxts.com
Triple Frequency GNSS Receiver Complete with a compact design for mobile applications
The BD990 supports triple frequency for the GPS, GLONASS, BeiDou and Galileo constellations. The receiver offers quick and reliable real-time kinematic (RTK) initializations for centimeter positioning. It features Trimble Maxwell 7 technology, which provides 336 tracking channels, Trimble Everest Plus multipath mitigation, and advanced RF spectrum monitoring and analysis. With the option of utilizing OmniSTAR or RTX services, the BD990 delivers varying levels of performance down to centimeter-level without the use of a base station. The BD992 also supports dual antenna GNSS heading while the BD992-INS supports position and orientation at high update rates. Trimble, oemgnss.trimble.com
MACHINE CONTROL
Automated Steering System Designed for precision agriculture applications
The SAgro150 automated steering system aims to provide farmers with an easy way to get started with auto-steering. With full-constellation tracking capability, the SAgro150 realizes ±2.5 cm auto-steering accuracy to maximize land use and yield while saving resources such as water and fertilizer. When compared to the first-generation SAgro100 system, the SAgro150 auto-steering system uses a single-antenna solution instead of a dual-antenna solution. It also features simpler integration options, only requiring a strong magnetic chuck to securely attach the antenna to the top of the tractor for satellite signal tracking. The new system also adopts dual gyroscope mode, enhancing the heading data reliability and compatibility with different tractors. The new system aids in applications such as rotary tillage, ridging, sowing and harvesting in straight line, curve, U-turn and more. SingularXYZ, singularxyz.com
Positioning and Heading Receiver Designed for multiple applications
AsteRx SB3 Pro+ is a housed multi-frequency GNSS receiver that uses triple-band GNSS technology for reliable centimeter-level real-time kinematic (RTK) positioning and sub-degree heading. With flexibility to be used as a rover or a base station, AsteRx SB3 Pro+ also has an ultra-high update rate and logging functionality. Enclosed in a ruggedized IP68 housing, the device is suitable for harsh environments. The AsteRx SB3 Pro+ has a high update rate and low latency for fast moving vehicles or machine parts. Septentrio, septentrio.com
GPS Antennas Offers enhanced navigation and tracking for automotive applications
The KP Performance vehicle GPS antennas come equipped with a gain of 28 dB to capture weak signals, even in the most challenging environments. The antennas also feature high out-of-band rejection. By minimizing signal interference and multipath effects, the antennas provide good signal quality and stability. The features of the antennas enable more precise navigation and enhanced user experiences for personal vehicles, commercial fleets, or autonomous systems. The antennas have a IPX6- or IP66-rated waterproof and dustproof design for reliable operation in harsh conditions. KP Performance, kpperformance.com