u-blox has partnered with ORBCOMM, a pioneer in Internet of Things (IoT) technology, to develop solutions for the convergence of terrestrial and satellite IoT communications markets.
According to the Ericsson Mobility Report, the number of cellular IoT connections is projected to reach around 5.5 billion by 2028. The satellite IoT communications market is also expected to triple by 2025. Combining these two technologies will provide gap-free global connectivity for IoT communications, even in previously uncovered areas, making it more accessible for IoT deployers.
With this partnership, u-blox will integrate ORBCOMM’s satellite communication protocols into its UBX-R52/S52 LPWA (low-power wide-area) modem SoC (system-on-a-chip) resulting in a smaller, less complex chipset that offers dual connectivity. This chipset will be used in future u-blox module products, enabling connected solutions across the globe.
The collaboration between ORBCOMM and u-blox will meet the increasing demand for IoT solutions capable of connecting devices in remote locations, areas with poor cellular coverage and isolated environments. Various industrial IoT applications can benefit from these solutions, such as asset tracking, equipment tracking in agriculture and construction industries, and industrial sensors.
“Pairing ORBCOMM’s satellite technology with u-blox’s innovative UBX-R52/S52 chipset will allow customers deploying IoT solutions in the supply chain, heavy equipment, and agriculture industries to benefit from ubiquitous coverage, device simplicity, along with optimal reliability and longevity,” said David Roscoe, ORBCOMM’s executive vice president of satellite communications and products.
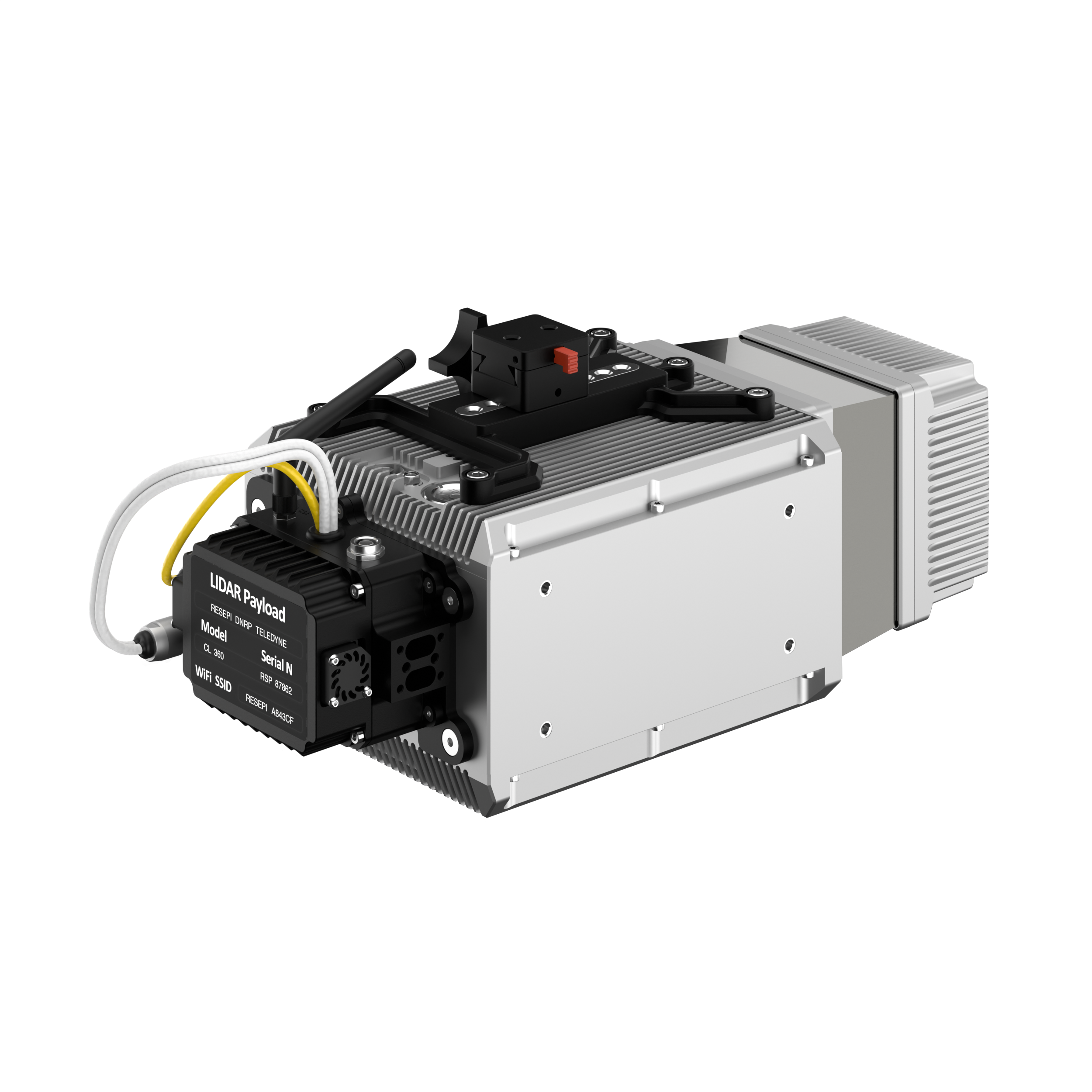
Inertial Labs has added a new scanning and mapping solution to its Resepi line, the Resepi Teledyne Optech CL-360-HD. The device has a powerful four-return laser and increased range of up to 750 m, making it ideal for mobile mapping, forestry and crack detection in critical infrastructure areas such as airport runways.
Resepi is a sensor-fusion platform designed for accuracy-focused remote sensing applications. Resepi utilizes a high-performance Inertial Labs INS and a high-accuracy dual antenna GNSS receiver, integrated with a Linux-based processing core and data-logging software. The platform also provides a WiFi interface, optional imaging module, and external cellular modem for RTCM corrections. Resepi can be operated by a single hardware button or from a wirelessly connected device via a simple web interface.
Resepi, equipped with Teledyne‘s CL-360HD lidar, offers various laser scan speeds and frequencies, allowing users to tweak the settings to match their individual needs.
An exclusive interview with Tim Erbes, Technical Director, Safran Federal Systems (formerly Orolia Defense & Security). For more exclusive interviews from this cover story, click here.
What are currently the key challenges for simulation?
One of our big challenges is determining what performance requirements are necessary for our users. Often, they can’t determine what the specs need to be. All they know is that they need it to work. “I need this receiver from one company, this IMU from another company, and the simulator I got from you guys to work together and I need the performance to match reality.” It can be very challenging to say, “What are the requirements for the simulator? How accurate does it need to be? What types of things matter in this integration?”
Often, we’re left trying to figure that out. So, that’s an interesting, maybe unexpected challenge. It’s easy to look at the datasheet and see what some specs are, but it’s a much harder thing to say, “Well, what do you need the specs to be?” So, we’ve been working with our customers to try to nail down some of those specs, particularly with Wavefront. We have some specs on such things as phase alignment and phase stability. But how do you translate that into something like “Well, I just want the CRPA to work the same in the lab as it does in the real world?” There’s not a direct, easy way to do that. We’re in the middle of trying to figure that out. That’s definitely one of our challenges.
What about the increase in jamming and spoofing threats?
In the last five years, we’ve seen a lot more open talk about jamming and spoofing in the world. The receiver manufacturers must think about this a lot more. What’s interesting from a simulator point of view is that this is not actually new for us. We have the advantage that we’ve been designing to program requirements for years and they have included jamming and spoofing for years. So, in a way, simulation is ahead of this state of the world. Jamming and spoofing are not new or hard ideas for us. In fact, spoofing is similar to simulation. So, we already know how to do that.
Image: Safran Federal Systems (formerly Orolia Defense & Security)
However, jamming and spoofing are new to programs and integration labs. So, there might be platforms where they’re now testing against jamming or spoofing requirements where in the past, maybe they didn’t do that. They certainly can use our simulators to help them do that. However, we’re not seeing a lot of new requirements coming to us saying we need new jamming or spoofing capabilities, because we already have them. Luckily, we are future oriented regarding the jamming and spoofing requirements, so those really haven’t been a challenge for us yet.
That can always change, right? If new requirements come up, such as higher data rates or wider bandwidth waveforms or different types of waveforms, then we would have to adapt and add support for that kind of stuff. As of right now, however, we aren’t really seeing that. So, luckily, we’re prepared for that. As for the industry as a whole, there has definitely been a big movement in the last few years to understand the effects of jamming and spoofing. Simulation is a big part of that.
What about the completion of the BeiDou and Galileo constellations?
For a long time, we simulated four constellations. Then that began to get fuzzy. Do you consider SBAS a constellation or is that just an augmentation? Do you count EGNOS and other supplemental constellations for the other constellations? What about NavIC and QZSS? Before you know it, you start to lose track of exactly how many you have. We just released our 8th constellation, Xona.We’re going to be demonstrating it at JNC.
Tell me more about that.
We are trying to have all the constellations and that can be a fuzzy definition. Does that mean all that are up there right now or all that will be up there in the future? We’re trying to be forward looking and add everything that is going to be up there or might be up there so that lab users can develop and test. Multi-constellation simulation is a particularly challenging problem for groups that don’t have simulators. If you’re just doing research on, say, GPS, and want a new code, you might be able to do that in a lab on your own. But as soon as you say, “I want to do research on whether this LEO constellation helps navigation on a receiver that also uses Galileo and GPS,” suddenly, your research requires a full multi-constellation simulation.
There are two choices. One is to have a simulator do the constellations that already exist, and then you have some research to add constellations. That can be very challenging, especially with time alignment and things like that. The other is to have a simulator that can do all the constellations. That would be the easy choice, right? That presents a problem with such things as LEO navigation being on the rise and these constellations that are just emerging, that are still not even fully defined.
So, we’re trying to build those into our simulation products, to help researchers and decision makers determine whether these will be useful features to add to their receivers or their systems. We have the advantage of having a software-defined architecture. We designed the software so that it is easy to add new constellations to it. Basically, once we’re given a proper ICD, we’re only a couple of months away from a first draft implementation of that new signal. Then we iterate. There used to always be a government-driven, multi-year program to develop an ICD. Now, we have this new concept of the signal manufacturers. We’re seeing private companies release signal specs. That’s a very different way of creating a signal in a constellation. So, sometimes you don’t get much time between when the ICD is available and when simulator users want to use that constellation. Having a software-defined architecture really helps us move quickly. We can add such things as Xona very fast.
Xona told me a couple of days ago that they will soon put out an ICD. What’s the difference between actual signals that you can record and play versus something that’s only on paper?
That’s a great point. Probably many people don’t realize, when they first look at this, that what’s in the ICD and what’s on live sky are sometimes very different. Is the simulator supposed to match live sky? Or is it supposed to match the intended final state of the constellation, according to the ICD? This is a huge topic for M-Code, which is ever changing, and has a very large ICD that’s been released. Space Systems Command/Military Communications & Position, Navigation, & Timing (MCPNT) controls the features and releases them incrementally. We’re constantly having to make changes to the simulator to match those releases. The same is true for the other ICDs. At the Institute of Navigation Joint Navigation Conference (JNC), we will demonstrate an expanded PRN. I think this showed up in the ICD a couple of years ago, but it’s not used by any users yet. Some of the receiver manufacturers are starting to look at using PRNs beyond 32. So, we’re adding that to the simulator. This has already happened for BeiDou as well. I think their ICD goes up to more than 60 satellites. It’s an ever-changing race. The ICDs are constantly being updated and we’re trying to update the simulator.
Image: Safran Federal Systems (formerly Orolia Defense & Security)
Meanwhile, live sky is many years behind the paper, right? This creates an interesting challenge: when you design a system, are you designing it for today or for the future? We have users in both groups. We have users that only care about what is happening today, because they need a model. Maybe you want to model a specific mission and you want to make sure that everything’s going to go properly. Or maybe you’re designing a system that you want to release in three or four years, and you want to make sure that it’s going to work with the state of the system then.
A big challenge is to make sure that we’re keeping pace with all these ICDs. There are more constellations than ever and the technology makes it easier to change signal architectures. We’re seeing signals change faster than we’ve ever seen them change before. We go to conferences and hear about such things as on-orbit reprogramming and signals that might even change specs while they’re being transmitted. Maybe they don’t even have to have a fixed bandwidth or fixed bit rate. We’re going to start talking about signals that can reprogram on the fly. That’s going to make simulation more and more challenging. The technology exists to do this.
Software-defined waveforms is a very logical step. In the software world, we have this concept of version nightmare. When you have 20 different pieces of software that are interdependent, it can get very challenging. We’re going to start to see that in simulators. We’re going to see, “Hey, what version of navigation authentication are you using? We updated it six months ago. Are you using the new one or the old one? Which one should we use?” Well, it depends on what your receiver is using. It’s going to be interesting and challenging to keep all this straight in the next few years as things evolve. Certainly, however, our goal is to be there for all of it and to be as fast and as forward thinking as we can for our customers. That means that we also need to know what our customers need. So, we’re always looking for feedback and requests, what challenges our customers face and we’re responding to those requests.
Tell me more about the difference between simulators used by receiver manufacturers in their labs as they’re tweaking receivers or developing new ones vs. simulators used for mission planning.
The simulators are the same, but they’re used in very different ways. In most lab simulation, what the constellation looks like that day doesn’t matter very much. They can just run with a default constellation for a given day. They’ll run that scenario hundreds or thousands of times and never need to change it because they’re testing parts of the receiver that don’t care a whole lot about the specifics of what’s happening.
Whereas missions are time- and location-specific.
Yeah, exactly. They want to know which satellites will be overhead at an exact time and place. It’s not so much a problem anymore, but there used to be certain days and times when you would not get enough satellites in view, or you might have very bad dilution of precision, and your mission might actually fail. We’re past those days. There are now enough satellites up there. Most receivers will navigate within their specs most of the time in most places. However, for critical missions, such as military operations or rocket launches, you might not want to just assume that any day is a good day. So, if you’re about to launch a rocket, you might want to check. “What does the constellation look like right now?” The challenges that brings is that simulators have a default constellation, but the constellations are constantly changing.
When you’re doing real day mission planning, the big problem isn’t so much how to generate a signal, it’s how to find out what’s happening today. That’s really the nature of the problem because what’s out there today is different from what was happening yesterday or what will happen tomorrow. You might have unhealthy satellites. You need to know that if you want to model them. It becomes a big challenge to get all the right data into the simulator. Once all that data is in there, then it’s the same as any other simulation.
Are there good sources for current data on GLONASS, BeiDou and Galileo?
Image: Safran Federal Systems (formerly Orolia Defense & Security)
There are a couple of websites that provide information about where the satellites currently are. However, we’ve found that each one of those sites has its own challenges. Some are maybe 30 minutes out of date, which is pretty good, but puts the satellites in slightly different spots. Some of those sites only support some of the constellations. We’re talking about multiple countries and they don’t all agree on how this should be done. So, there’s not a single point that you can visit to get all the satellite data. There are a couple of companies that try to fix this. U-blox has AssistNow; Qualcomm has an assist for its cellular receivers; Trimble, NovAtel, and a couple of other companies have their error correction services to which you can subscribe to get some of that data.
If you want real-time up-to-date ephemeris for all the constellations, that is challenging. There are one or two options we have found that seem to work, but they each have their disadvantages. Maybe they don’t have all the satellites. Again, we’re talking about versioning issues. So, if you’ve designed your system with a certain version of an ICD and they’ve added more satellites since, those new SVs maybe aren’t so important for your users, so you don’t publish them. Other users want those satellites. So, we see versioning issues in these data streams. For example, we use the CORS network to get a lot of GPS data but that whole network, as far as I know, is only running the legacy data. As far as I know, no network is distributing the L1C modernized data that we will need at some point. So, as we launch new signals and constellations, we need the networks to provide this new data.
What are some other challenges?
For us, being a software-defined simulator on a platform dependent on software-defined radio (SDR), we’re constantly looking at what’s changing in the SDR technology community. There’s always some interesting stuff happening there that we try to incorporate. We don’t have any big announcements this year, as far as new architectures or anything like that. However, the SDR community is evolving. It’s still a rather new industry. A few years ago, we were an early adopter of SDR technology for mass deployment. Now, we’re seeing some more mature SDRs starting to push such things as channel count and coherency. We will probably take advantage of that in the future.
The other interesting thing technology-wise is that we’re also a GPU-dependent technology. So, as the GPU industry continues to evolve and makes bigger and faster GPUs, we get a relatively low-cost way to upgrade. We don’t have to do a lot of R&D to upgrade to a new GPU. For our users that means that the number of signals they can generate on their simulators is always increasing even using the same hardware from one generation to the next. Our first simulator did 75 signals; the next version did 150. We could build a system that did more than 1,000 signals, but our users don’t need it.
I assume that the growth curve for GPUs is steeper than that for signals.
I think that you’re right about that. I’m sure glad they do, because then something like Xona shows up and we don’t have to rearchitect our system to generate 300 signals, right? At JNC we will show expanded PRN, 300 Xona satellites in the constellation, and a 10 fold improvement on Wavefront performance specs.. We will continue to build simulators that meet our customers’ requirements. Besides GPUs, a lot of the technology involves software R&D and signals. The stuff that we do digitally inside of our system that allows us to do things like extremely precise phase alignment on Wavefront, for example. We spent a lot of time developing that stuff.
Military officials from across all branches, federal security personnel, and industry leaders are set to convene for the second installment of AUVSI Defense 2023 on September 14 at the United States Army General Gordon R Sullivan Conference and Event Center in Arlington, Virginia.
The forum encourages industry leaders and attendees to connect with decision-makers and program managers across various agencies — as well as accelerating the development, funding, and acquisition of critical uncrewed technologies.
AUVSI Defense is where military and industry can set the course for innovation to support critical missions. This specialized program equips the armed services and their partners with the information and relationships they need to meet constantly shifting threats around the globe.
This year, the event will focus on the role that autonomy and AI play in U.S. Defense uncrewed/unmanned systems scalability and technology development, and why this is essential to strategic competition.
Program highlights include:
Keynote by Brent Ingraham, Deputy Assistant, Secretary of Defense Platform and Weapons Portfolio Management, OUSD
Keynote by Dr. Matt Turek, Deputy Director I2O, DARPA
Panel Discussion – Autonomy and AI Intelligent Systems Development and Integration for Strategic Advancement of Military Uncrewed Systems.
Moderated by: Dr. Jaret Riddick – Senior Fellow, Center for Security and Emerging Technology, Georgetown University
Panelists including: CAPT Daniel Malatesta, Program Manager PMS 408, U.S. Navy; Dr. Randy Yamada, Vice President Digital Battlespace Autonomy, Booze Allen Hamilton; and Dr. Jordan Fletcher, Chief Engineer, Army Platforms, MITRE.
For more information and registration, visit the AUVSI Defense website.
Image: Safran Federal Systems (formerly Orolia Defense & Security)
As the number of constellations, satellites, and signals has grown in recent years — especially in the past few years, with the completion of the BeiDou and Galileo constellations — simulator manufacturers have been challenged to keep up. Threats of jamming and spoofing also increased. Then, a few companies began to develop new positioning, navigation and timing (PNT) constellations in low-Earth orbit (LEO).
Due to the limited space available in print, I was able to use only used a small portion of the interviews I conducted for our August cover story. For full transcripts of them see below:
Full interview with Tim Erbes, Technical Director, Safran Federal Systems (formerly Orolia Defense & Security).
Full interview with JulianThomas, Managing Director, Racelogic.
Full interview with Jürgen Pielmeier, Managing Director, IFEN.
Full interview with Mark Holbrow, VP of Product Development, Spirent Communications and Roger Hart, Sr. Director of Engineering, Spirent Federal Systems.
REIGL and StriekAir engineering GmbH have successfully completed the integration of an airborne scanning system, the RIEGL VUX-12023, on the StriekAir VTOL CarryAir UAV from Germany. During its inaugural flight, the integrated technology successfully captured accurate data of the ground structure.
The RIEGL VUX-12023 laser scanner is recognized for its precision and accuracy in aerial surveys. When integrated with the VTOL CarryAir, the UAV can reach a cruising speed of 85 km/h and offers users a combination of point cloud density and efficient data acquisition.
With the integration, users can acquire data about eight times faster than with conventional multicopters, according to REIGL. This time-saving feature aims to provide users with enhanced efficiency and data accuracy.
Matthias Hutecek (RIEGL) and Thomas Strieker (StriekAir engineering GmbH). (Image: REIGL)
The UAV can be utilized in a variety of applications — including surveying construction sites and infrastructure projects, mapping corridors, collecting topographic data for urban planning and environmental studies and more.
The RIEGL VUX-12023 offers smooth integration on UAS/UAV/RPAS, small manned airplanes and helicopters. It is offered as a stand-alone UAV lidar sensor and also in various fully integrated UAV-based laser scanning system with appropriate INS/GNSS system and optional cameras based on users’ needs.
A roundup of recent products in the GNSS and inertial positioning industry from the August 2023 issue of GPS World magazine.
SURVEYING & MAPPING
Laser Scanner With several integration options
The VQ-840-G is a fully integrated compact airborne laser scanner designed for combined topographic and bathymetric airborne and UAV-based surveying. The system is offered with an optionally integrated and factory-calibrated inertial measurement unit/GNSS system and can be complemented with an optional camera or IR rangefinder. It also has an optional integrated inertial navigation system. The scanner carries out laser range measurements for high resolution surveying of underwater topography with a narrow, visible green laser beam, emitted from a pulsed laser source. The VQ-840-G has high spatial resolution due to a measurement rate of 200 kHz and high scanning speed of up to 100 scans/second. Riegl, riegl.com
Laser Scanning System A versatile reality capture solution suitable for surveying, construction and engineering users
The X9 is designed to enhance performance in more environments while leveraging Trimble’s X-Drive technology for automatic instrument calibration, survey-grade self-leveling and laser pointer for georeferencing. The X9 expands on Trimble’s X7, delivering longer range, higher accuracy, shorter scan times and sensitivity, improving scan results. Advanced processing and a high-performance laser increase the sensitivity of all scans, enabling the X9 to capture difficult dark or reflective surfaces. A new center unit design also improves signal transmission for better scan quality. The X9 provides accurate and dependable data, enabling confident decision making both in the field and in the office through in-field registration with Trimble Perspective and FieldLink software by minimizing the need for target deployment. The auto-calibration eliminates the need for annual calibration. In addition, the X9 includes survey-grade self-leveling with the industry’s widest compensation range for fast, easy setup. The X9 data can be delivered directly from the Perspective or FieldLink software to Trimble’s office software — including the Realworks 3D scanning software — business center office software, SketchUp and Tekla, or exported to industry-standard formats to produce application-specific deliverables. Trimble, trimble.com
Survey Cameras For photogrammetric applications and to complement lidar survey data
The C5 and C30 orthographic and oblique cameras are designed for aerial surveys. The systems provide high-quality imaging solutions for photogrammetric applications and to complement lidar survey data. The C5 camera is an efficient and lightweight system for aerial surveys, weighing 290 g for increased flight endurance. Its compact size of 75 mm x 63.5 mm x 102.5 mm allows easy integration into UAVs. The C30 camera’s weight is 600 g with a size of 110mm x 108 mm x 85 mm. The C30 is also designed for aerial surveying. The C5 and C30 cameras’ universal installation design makes them compatible with a wide range of fixed-wing and rotor UAV platforms. Both cameras are supported by the CHCNAV’s BB4 Mini and P330 Pro UAVs as well as the DJI’s M300 RTK. The C5 and C30 cameras give maximum flexibility for photogrammetric applications. They can be used independently on real-time kinematic-enabled UAVs to capture high-resolution imagery or installed directly on the CHCNAV’s lidar series to colorize point cloud data. This feature allows seamless imagery and lidar data integration for a more complete view of the surveyed area. CHC Navigation, chcnav.com
GNSS Palm RTK For surveying and mapping, GIS and more
The T20 is light, weighing 0.68 kg, and has low power consumption with 12 hours of battery life. It integrates functions such as a GNSS module, datalink module, 4G, 5.0 dual-mode Bluetooth, data memory system and more. Powered by the SinoGNSS K8 high precision module, the T20 has 1,590 channels and can track all running and planned constellations including GPS, BDS, GLONASS, Galileo, QZSS and satellite-based augmentation systems. Additionally, the anti-interference algorithm enables the T20 to maintain accurate positioning and perform well in complex environments, providing surveyors with high-quality measurements. The T20 is equipped with a third-generation inertial measurement unit from ComNav, which can be tilted and measured at an angle up to 60°. The T20 is also equipped with a U50 datalink module, which enables it to switch between base and rover. The T20 is compatible with mainstream real-time kinematic receivers on the market. ComNav Technology, comnavtech.com
Hybrid Imaging and Lidar Sensor Designed for airborne mapping
The CountryMapper is designed for large-area imaging and lidar mapping. Combining a large-format photogrammetric camera with a high-performance lidar unit into a single system, the CountryMapper collects foundational geospatial data simultaneously to support a wide variety of user applications. The CountryMapper combines imaging and lidar sensor modules into a highly efficient hybrid airborne system. The sensor features CMOS-based Leica MFC150 camera modules that leverage true mechanical forward-motion-compensation to deliver high image quality. The sensor’s new Hyperion3 lidar unit features 60° field of view, improving the performance and flexibility of the system compared to previous lidar modules, while reduced laser divergence provides greater planimetric accuracy and better foliage penetration. The CountryMapper fully integrates with Leica HxMap multi-sensor end-to-end processing workflow, enabling distributed processing of images and point clouds to optimize productivity for very large data sets. The CountryMapper supports applications such as orthophoto generation, terrain mapping, hydrography, forestry monitoring and infrastructure management. Users of previous-generation sensors can leverage their initial investment and upgrade their systems to the CountryMapper configuration. Leica Geosystems, leica-geosystems.com
MOBILE
GNSS Network Rover Complete with an integrated MEMS IMU
The Triumph-3NR (T3-NR) is a small, lightweight GNSS network rover with more than 25 hours of run time on a single charge. The T3-NR easily connects to real-time networks for corrections to get GNSS real-time kinematic with inertial measurement unit tilt compensation. The network rover has 874 channels and can track all constellations. It features an internal GNSS antenna, Wi-Fi, Bluetooth, and is USB compatible. The T3-NR is suitable for demanding industrial applications. JAVAD, javad.com
Antennas Suitable for lawn mowers and other mobile applications
The HX-CSX014A is a high gain, low profile and compact antenna with a new structure that simplifies integration into lawn mowers and minimizes the overall machine dimension. It features small size, high sensitivity and low power consumption. The HX-CSX231A, is a ready-to-use GNSS antenna with a highly reliable structure that makes it small and lightweight. It exhibits 4.5 dBi high gain performance with ultra-low signal loss. It also delivers wide beam width that covers wide frequencies with high marginal gain, a perfect option in complex environments. Additionally, the HX-CSX231A’s advanced LNA features improved signal filtering, out-of-band rejection, restrained unwanted electromagnetic interferences and a strong multi-path reduction capacity. Harxon, en.harxon.com
DEFENSE
PNT Device Enables dismounted maneuver operations even where GPS is compromised or denied
The TRX DAPS II provides assured positioning, navigation, and timing (PNT) to dismounted users by disseminating assured position and time to dependent devices in GPS-challenged environments. TRX DAPS II fuses inputs from M-code GPS, inertial sensors, and complementary PNT sources. It is a small, lightweight PNT device that supports both standalone operation and integration with the Nett Warrior ensemble. It also can distribute PNT information to a customized tactical watch. The TRX DAPS II solution employs a modular architecture and adheres to Army PNT interface standards, facilitating the addition of new PNT sensors as threats evolve. This device will be in production for the Army later this year. TRX Systems, trxsystems.com
TIMING
Image: Microchip Technology
Atomic Clock Maintains system synchronization when GNSS signals are denied
The 5071B cesium atomic clock can perform autonomous time keeping for months in the event of GNSS denials. This device is the next-generation commercial cesium clock to the 5071A. The 5071B is available in a three-unit height, 19-in rackmount enclosure, providing a compact product to work in environments where it can be easily transported and secured versus a larger alternative designed specifically for laboratory environments. The 5071B has upgraded electronic components to address possible obsolescence or non-RoHS circuitry. The clock provides 100 ns holdover for more than two months, maintaining system synchronization when GNSS signals, such as GPS, are denied. As a cesium beam tube product with no deterministic long-term frequency drift, the 5071B provides absolute frequency accuracy of 5E-13 or 500 quadrillionths over all specified environmental conditions for the life of the product. For military applications requiring rapid deployments for system radars, 5E-13 stability eliminates the need for the acquisition of external synchronization sources prior to radiating. Microchip Technology, microchip.com
OEM
GNSS Positioning Modules
For multiple applications
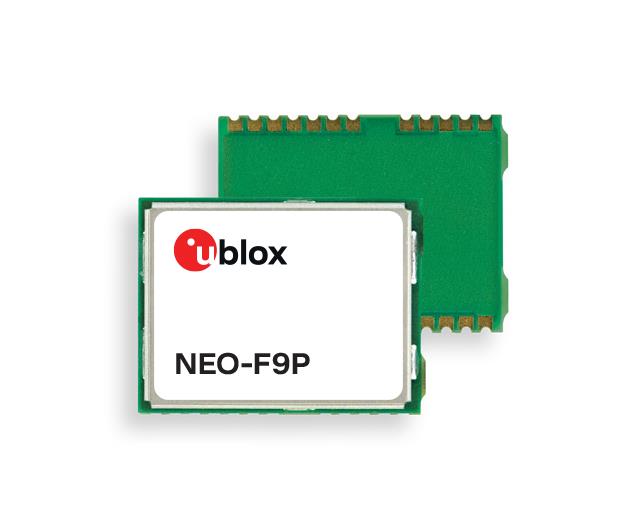
automation of moving industrial machinery, and the ZED-F9P-15B provides customers in the mobile robotics market with an L1/L5 option in addition to the L1/L2 bands. These two modules are based on the u-blox F9 high-precision GNSS platform. The NEO-F9P and the ZED-F9P-15B GNSS modules feature concurrent reception of GPS, Galileo, and BeiDou; multi-band L1/L5 real-time kinematic; short convergence times; and reliable performance. The modules deliver centimeter-level accuracy in seconds and come in small, high-precision form factors.
Its small size, coupled with very low power consumption and ANN-MB1 antenna compatibility, makes the NEO-F9P suitable for a wide range of uses. Offering reliable and efficient positioning, the module supports open as well as standards-based correction services for enhanced performance, such as the u-blox PointPerfect GNSS augmentation service. u-blox, u-blox.com
Image: Septentrio
GNSS Receiver Module
Features built-in AIM+ technology for interference mitigation
The mosaic-X5 is a multi-band, multi-constellation GNSS receiver in a low power surface mount module with a wide array of interfaces. It is designed for mass market applications such as robotics and autonomous systems — capable of tracking all GNSS constellations, supporting current and future signals. The mosaic-X5 has an update rate of 100 Hz, is easy to integrate, and is optimized for automated assembly. The mosaic-x5 is suitable for autonomous vehicles, logistics and port operations, mining and construction, precision agriculture, rail, robotics, surveying and mapping, UAVs and more. Septentrio, spetentrio.com
Mapbox, a maps and location platform, has released new platform updates to enhance user’s 3D mapping experience by adding powerful dynamic lighting capabilities and landmark 3D buildings.
The new ready-to-use platform aims to enhance wayfinding and spatial orientation for users and provides a polished canvas for custom location data. Mapbox Standard is now accessible in public preview and available in pre-releases of the latest versions of its web and mobile SDKs.
Dynamic lighting for a natural day to night shift
Mapbox Standard provides four lighting presets: day, night, dusk and dawn. As the sun moves throughout the day, based on a user’s location, shadows shift and highlight different areas of the map. The dynamic lighting creates a true-to-life experience that can help users better orient themselves in the physical world.
Image: Mapbox
Landmarks improve map comprehension in 3D
As part of Mapbox Standard, Mapbox has created a dataset of hundreds of recognizable landmarks across the globe, with more being added each month. The landmark buildings integrate seamlessly into the map environment and respond dynamically to lighting changes.
Therefore, our cartographers chose a sleek and beautiful symbolic realism design for Mapbox Standard design that offers users an easy-to-read map where elements such as landmarks, buildings, roads and trees are clearly identifiable while keeping icons, labels and custom location data elements visible.
Users can choose between the new 3D elements and the 2D map within their application. Mapbox Standard is built with a base map that evolves alongside custom layers, delivering up-to-date rendering features and data layers without a manual style update or version upgrade.
To explore the new Mapbox Standard style, click here.
A2Z Drone Delivery, developer of commercial UAV delivery solutions, has launched its second generation RDST integrated cargo UAV, the RDST Longtail. The RDST Longtail features the company’s factory-integrated RDS2 drone winch, allowing payloads to be deposited safely from altitude so that spinning rotors are kept far from people and property.
The RDST Longtail serves as an off-the-shelf, ready-to-fly delivery UAV for last mile delivery. It can deliver or retrieve payloads up to 5 kg and over a distance of 11 km, making it suitable for various applications such as local parcel or food delivery, emergency medical deliveries, water sampling programs, offshore logistics, search and rescue operations and more.
The RDST Longtail continues the company’s focus on addressing consumer-protection concerns as the number of residential drone deliveries increases. By conducting deliveries from altitude, A2Z Drone Delivery’s solutions protect recipients from spinning UAV propellers, while mitigating privacy concerns of low-flying UAVs. Depositing payloads from altitude also keeps the UAV high above trees, power lines and buildings, enabling longer sight distances for missions requiring visual line of sight.
With the upgrades made to the RDST Longtail, A2Z Drone Delivery aims to democratize drone delivery for residential delivery and cases where operators need to quickly and efficiently deliver or retrieve payloads. For example, A2Z Drone Delivery platforms are in use delivering emergency defibrillators to first responders in the field, collecting water samples for analysis and delivering supplies in disaster relief efforts.
The UAV can also auto-release packages without the need for a recipient to be present at the delivery location. This is made possible by the all-new bag auto-release mechanism, allowing for easy pickups and auto-releasing of bags during deliveries.
Designed to meet FAA regulations, the RDST Longtail is remote ID compliant with a factory-integrated remote ID beacon. The Premium edition of the drone can fly in inclement weather and features a quick-release battery system for minimal downtime.
“Our prototype RDST Longtail has already logged 500 flight hours conducting daily residential parcel deliveries near our Ground Zero Test Facility outside Shanghai,” said Aaron Zhang, founder and CEO of A2Z Drone Delivery. “Many of the upgrades included in this second generation RDST have been made in response to customer feedback on capabilities they need to deploy for missions in inclement weather. The RDST Longtail is the flexible commercial delivery UAV for last-mile deliveries that will round out a logistics fleet.”
For more information on A2Z Drone Delivery system, click here.
Spirent’s GSS6450 record and playback system (RPS) used to record live-sky signals in an urban environment for testing in the lab.(Image: Spirent Federal Systems)
These are interesting and challenging times for the makers of GNSS signal simulators.
For decades, developers and manufacturers of GNSS receivers have needed to simulate the satellites’ signals to test receivers in their labs and in the field. Meanwhile, users of GNSS receivers for critical missions — such as military operations and rocket launches — have needed to simulate the exact conditions (the number of satellites in line of sight, the positional dilution of precision, etc.) at specific points in time and space.
As the number of constellations, satellites and signals grew — especially in the past few years, with the completion of the BeiDou and Galileo constellations — simulator manufacturers were challenged to keep up. Threats of jamming and spoofing also increased. Then, a few companies began to develop new positioning, navigation and timing (PNT) constellations in low-Earth orbit (LEO). Now, it is common for simulators to require several hundred channels.
I discussed these challenges and the prospect for the simulation industry with representatives of five companies:
Tim Erbes, Technical Director, Safran Federal Systems (formerly Orolia Defense & Security
For the full transcripts of my interviews, click here. If you like this article, you will love the interview transcripts, which cover much more than I had room for here.
Legacy Constellations and New Ones
Simulator manufacturers cite a variety of challenges. According to Erbes, a big one is determining users’ requirements. “Often,” he said, “they can’t determine what the specs need to be. All they know is that they need it to work.” This is particularly true when mixing and matching receivers, IMUs, and components from different manufacturers, he pointed out.
For decades, there were only two GNSS constellations (GPS and GLONASS). A couple of years ago, two more came online (BeiDou and Galileo). Meanwhile, several regional augmentation systems were developed (SBAS, EGNOS, NavIC, QZSS and KASS), some of which may later grow into global systems. Now, new LEO-based systems are being developed. For simulator manufacturers, what was once clear “began to get fuzzy,” Erbes said. “If you ask members of our team right now how many constellations we support, you will not get a quick answer. We’re trying to be forward-looking and add everything that might be up there so lab users can develop and test.”
Multi-constellation simulation is a particularly challenging problem for groups that don’t have simulators, Erbes pointed out. “We have the advantage of having a software-defined architecture. We designed the software so that it is easy to add new constellations to it. Basically, once we’re given a proper interface control document (ICD), we’re only a couple of months away from a first draft implementation of that new signal. Then we iterate.”
In the past few years, said Thomas, Racelogic “had to suddenly invent 15 new signals.” It makes a record-and-replay system — “You put a box in a car, on a bike, in a backpack, or on a rocket, and you record the raw GPS signals,” Thomas said — and another system in which it simulates the satellites’ signals “from pure principles.” The latter, he noted, has been “15 times the original work we thought it would be. However, as we add each signal it tends to get a bit simpler until they add new ways to encode signals, and then it gets complex again.”
Spirent Communications’ technology, Holbrow said, focuses around “its dedicated SDR hardware platform and software simulation engine, which provide performance, scalability and flexibility, within an open accessible architecture. Close collaboration with our selected partners ensures the opportunity to support and integrate new and emerging PNT technologies through their tools, applications and hardware.” Two other aspects that have continued to grow in importance have been “increased realism and test automation,” Holbrow said. “Both are areas in which Spirent continues to prioritize and invest R&D dollars.”
Spirent “can enable the user with effectively an arbitrary waveform simulator or ‘sandbox’ to experiment with different modulation schemes, different chipping rates, codes, bandwidths and navigation data content,” Holbrow said. “The increasing number of signals that we can support multiplies the permutations and combinations of test cases that users can do,” Hart added.
Not every simulator user is equally interested in simulating all the existing and emerging constellations. Those in the U.S. military market do not use foreign signals, pointed out Clark. However, they may want to understand how those signals could impact their vehicle, platform, or individual receiver.
LEO-based constellations “have become a buzzword in the last year or so,” Clark said. Because CAST Navigation’s simulators are modular and use an FPGA-based design, “we can add different satellite constellations or satellite protocols to our system,” he said. “However, we don’t offer anything commercially yet due to a lack of an official ICD, or any kind of documentation that defines any of these new LEO-based signals.”
Today, said Pielmeier, all high-end RF simulators must support “all existing GNSS systems with all related signal components on all frequencies.” Additionally, to remain competitive, they must be kept “up-to-date with the new and continuously evolving GNSS signals.” He added: “Beyond the L-band signals, we are also fully supporting the S-band signals of the NavIC constellation.”
The increased request for precise point positioning (PPP) corrections service, Pielmeier pointed out, was the driver for IFEN to add the High Accuracy Service (HAS) PPP-correction capability on Galileo’s E6-B signal to its next release. “We expect further improvements here during the next few years, especially to cover the emerging needs of the PPP-RTK market.” The advent of LEO-based PNT services, he said, makes this “the most important driver for the next five years, extending the signal frequencies beyond the current L- and S-band signals, seeing new modulations, two-way transfer and many more topics.”
Jamming and Spoofing
Concern about jamming and spoofing has increased significantly over the past several years. These, however, are not new concepts for simulator manufacturers. “In a way, simulation is ahead of this state of the world,” said Erbes. “Spoofing is similar to simulation. So, we already know how to do that.” That could change, however. “If new requirements come up, such as higher data rates or wider bandwidth waveforms or different types of waveforms, then we would have to adapt and add support for that kind of stuff.”
“Because our systems record and replay, they’re used a lot to record real-world jamming,” said Thomas. Regarding spoofing, Racelogic has just improved its signal simulation. “We can do seamless takeover of a GNSS signal in real time. We can reproduce the current ephemeris and almanac. If we transmit a sufficiently powerful signal, we can completely take over that device.”
Over the past five years, most of CAST Navigation’s customers have become much more interested in being able to simulate jamming and spoofing, Clark said. “If you’re doing anything of any importance in a contested environment, you’re going to come up against some type of spoofing and/or jamming interference.”
Pielmeier agreed that simulation of jamming and spoofing threats has been a major market driver in recent years. “Our latest RF simulator generation, NCS NOVA+,” he said, “fully supports all types of jamming and spoofing and is fully integrated into our RF simulators to enable coherent signal generation. With the coming safety-of-life and automated driving applications based on DFMC (SBAS/GBAS dual-frequency multi-constellation), the need to support advanced jamming and spoofing simulation solutions will remain a continuous driver.”
IFEN’s rf signal generator technology, based on a modular and highly flexible Software Defined Radio (SDR) platform. (Image: IFEN)
Simulating What Does Not Yet Exist
The current GNSS constellations broadcast signals that can be recorded, played back, and used to generate accurate simulations. For systems still being developed, however, simulator manufacturers must rely on each system’s ICD, if and when it is available. Even for established systems, the live sky signals may diverge from the ICD. “Is the simulator supposed to match live sky,” Erbes wondered, “or is it supposed to match the intended final state of the constellation, according to the ICD? This is a huge topic for M-code, which is ever changing, and has a very large ICD that is released incrementally. We’re constantly having to make changes to the simulator to match those releases.”
A big challenge for simulator manufacturers is to keep pace with new and evolving ICDs. “There are more constellations than ever, and the technology makes it easier to change signal architectures,” said Erbes. “We’re going to start talking about signals that can be reprogrammed on the fly. That’s going to make simulation more and more challenging.”
Simulating signals for new systems that are not yet deployed is a matter of “pure signals simulation,” said Thomas. “You go through the ICD line-by-line and work out the new schemes. You are very much reliant on every single word in that ICD.”
New LEO-based systems are not the only ones to present this challenge to simulator manufacturers. “L1C is another one of those problem child signals that we have developed,” said Clark. “All we can do is buy all the makes and models of L1C receivers available for sale and utilize our simulator, along with those receivers, to see whether things are good. We’ve asked the government for an L1C code sample, but it will not be available until the satellite manufacturers launch the satellites in their final configuration. Until then, we’ll develop to the ICD that’s been released and defined, then cross our fingers.”
Spirent’s core simulation engine and SDR “are agnostic of the constellation and signal type that’s being generated,” Holbrow said. “So, the underlying principles of accuracy, range rate, pseudo-range control, and delay, together with the RF fidelity from Spirent’s SDR+ Sim engine, can be readily manipulated to simulate the wealth of emerging signals, including LEO.” Additionally, when an ICD is not available, the company can enable its customers to use its tools “to readily populate elements of that ICD themselves.”
In the Lab vs. In the Field
“All our systems can be carried in a backpack, on a push bike, in a car,” said Thomas. “We do that deliberately, because we come from the automotive side of things, so we have to keep everything very small and compact. Some of our customers have put them in rockets, recording the signal as it goes up, or in boats. We have people walking around with an antenna on their wrist connected to one of our systems, so that they can simulate smartwatches.”
CAST Navigation has simulator packages that range “anywhere from shoebox size to nine-foot-tall racks,” said Clark. “They are all modular, so you can add options and capabilities over time. We have simulators that are used in the field. Some of the testing groups with the U.S. armed forces have used our simulators in the back of a Humvee along with other proprietary equipment to conduct their own field experiments.”
Spirent supports in-the-field use cases: its portable simulator can test PNT resilience while the DUT is receiving live-sky signals, and their record-and-playback system takes real-world soundings in a wideband RF environment for playback in the lab.
Currently, Pielmeier said, all IFEN simulators are designed for lab use. However, “we recognize an increased request for field-capable RF simulators, specifically to perform spoofing of real SIS to test deployed GNSS receivers in the field. Offering a portable in-field solution is in our mid-term planning, but not a current driver for our developments.”
Testing vs. Mission Planning
How do simulators used by receiver manufacturers in their labs and in the field to tweak existing receivers or develop new ones differ from those used for mission planning? “In most lab simulations, they can just run with a default constellation for a given day,” Erbes explained. “They’ll run that scenario hundreds or thousands of times and never need to change it because they’re testing parts of the receiver that don’t care a whole lot about the specifics of what’s happening.”
Missions, by contrast, are time- and location-specific. Planners need to know which satellites will be overhead at an exact time and place. “When you’re doing real day mission planning, the big problem isn’t so much how to generate a signal, it’s how to find out what’s happening today.”
Increasing Accuracy Requirements
Like those for receivers, accuracy requirements for simulators are increasing to match those of emerging applications. “Everyone’s chasing the goal of getting smaller, faster, and more accurate systems,” said Thomas. “We do real-time simulators, and they want a smaller and smaller delay from when you input the trajectory to when you get the output. Luckily, we’re able to keep up on the hardware side as well, because much of our processing is done using software.”
As accuracy requirements rise, “Real-world testing has an incredibly important role to play,” said Holbrow. Additionally, as resilience testing places increasing demands on test equipment, Spirent Communications now supports “a multitude of vulnerability and corresponding mitigation/prevention test cases” to deal with jamming, spoofing, cyber-attack and CRPA
CAST Navigation’s simulators meet or exceed accuracy requirements, Clark said. “We have pseudo-range accuracy down to a millimeter, our phase coherence doesn’t wander, and we’re able to achieve 2.5 ps to 3 ps synchronization coherence during multi-element, phased-array antenna simulations. We see our customers interested in a higher performing simulator, and that is our commitment.”
Pielmeier had a different perspective on this: “We saw no increase in the required accuracy, as the typical requested accuracies are far beyond the real accuracy of the signals anyway.”
Recent Success Stories
Racelogic has developed a system to replace or augment GPS in tunnels, which often pass over each other or match the routes of surface streets. “We’ve been talking to many cities around the world that are building new tunnels,” said Thomas. “It requires installing repeaters every 30 meters along each tunnel and software that runs on a server and seamlessly updates your position every 30 meters.”
Clark pointed out that CAST Navigation’s “bread-and-butter” for the past few years has been “larger systems that can drive phased array antennas, along with inertial units, and full high-dynamic aircraft, in real-time environments.” He added that “the smaller systems, which used to be popular, have mostly gone by the wayside.”
As a recent success, Holbrow cited Spirent Communications’ release of a Xona simulator, in partnership with Xona Space Systems, as well as the addition of “many realism-related capabilities, including simulating the vibration and temperature effects of inertial systems;” a cloud-based software application called Foresight that enables users to understand the GNSS coverage they would expect at a particular time, location and trajectory based upon accurate 3D scenes; and a simulation test solution for the Galileo Open Service Navigation Message Authentication (OSNMA) mechanism. Finally, he stressed Spirent’s increasing support for automation.
Pielmeier cited the Galileo second generation Test User Receiver contract that IFEN received from the European Space Agency as its most important recent success. “Within this contract, the NCS NOVA+ simulator as RF test tool will be upgraded to full G2G signal generation capability. The new already implemented G2G signals enable shorter time to first fix (TTFF) and improved acquisition performance but also higher updates rates (e.g., for PPP-RTK). Through the end of the year, the G2G signal will be fully implemented in our RF simulator, including the next generation of advanced authentication solutions.”
Xona Space Systems has partnered with the Air Force Research Laboratory (AFRL) and the U.S. Space Force under a $1.2 million Direct to Phase II SBIR (Small Business Innovation Research) contract to work toward a secure low Earth orbit (LEO) positioning, navigation and timing (PNT) constellation leveraging Xona’s PULSAR service.
The contract was awarded through an AFWERX SBIR Open Topic, after Xona demonstrated its LEO PNT technology using the “Huginn” demo satellite in late 2022.
Xona is developing PULSAR – a high-performance PNT service enabled by a commercial constellation of dedicated LEO satellites.
The PULSAR service aims to advance PNT security, resilience and accuracy capabilities by augmenting existing GNSS while also operating as an independent PNT constellation.
“Our partnership with the AFRL Space Vehicles directorate and USSF’s Space Warfighting Analysis Center will give Xona the expertise necessary to seamlessly integrate PULSAR into the U.S. national security space architecture,” said Brian Manning, CEO, Xona Space Systems. “Early assessment of unique DOD PNT requirements will set us up for a successful transition to operational service.”
Colonel Jeremy Raley, commander of the Phillips Research Site and director of the AFRL Space Vehicles Directorate, said the investment will contribute to force design analytics that consider contributing signals from multiple orbit regimes.
“Lessons from this effort will pave the way for future defense programs to successfully utilize commercial space assets for flexible and diverse satnav that is resilient to the adversarial threat,” Raley said.
Preceding the award, Xona became the first company to launch a privately funded PNT mission progressing from concept to on-orbit in less than 12 months. Since then, Xona has partnered with major companies such as Hexagon | NovAtel, Septentrio, Spirent, Safran, and StarNav. In April 2023, the company moved into its new headquarters in Burlingame, California, where the company plans to start the production of PULSAR satellites.
ComNav Technology has released the second product of its Universe series of GNSS receivers, the Mars Laser RTK real-time kinematic (RTK). The Mars Laser RTK is suitable for surveying, mapping, and geographic information system applications.
The Mars Laser RTK features a datalink modem that transmits and receives across the full frequency range from 410 MHz to 470 MHz. With adjustable transmit power of 0.5 w to 2 w and a maximum distance of 15 km, it meets the measurement demands of complex environments. It can also switch roles between a rover and a base, enabling more flexibility in demanding applications.
The Mars Laser RTK is equipped with a Wi-Fi/4G modem and Bluetooth capabilities, facilitating reliable communication across various platforms. The device also features five LEDs on the front panel for satellite tracking, RTK corrections data and more.
Powered by the SinoGNSS K8 high precision module, the Mars Laser RTK supports full-constellation and multi-frequency tracking, including GPS, GLONASS, BDS, QZSS, IRNSS, and Galileo, and supports precise-point positioning service. Additionally, the device tracks more than 60 satellites and 1,590 channels.
The Mars Laser RTK’s third-generation inertial measurement unit (IMU) supports 60° tilt with 2.5 cm accuracy. The IMU can be set to both traditional mode with range pole and laser mode.