The natural sciences overlap — hence such fields as geophysics, astrobiology and biochemistry. So do the social sciences and humanities — hence such fields as political economy, political philosophy and social economics. Our very individual identities consist of multiple, intersecting factors — including gender, race, ethnicity, class, and sexuality.
Analogously, this magazine covers overlapping technologies. While we focus on global navigation satellite systems (GNSS) and other positioning, navigation and timing (PNT) technologies such as inertial systems, these technologies are often embedded in larger systems that also include sensors (such as lidar, radar and cameras) and, increasingly, artificial intelligence (AI).
That is why we so often cover unmanned aerial vehicles (UAV) — which use GNSS for positioning navigation, geofencing and stabilization; use sensors to collect data; and will soon use AI for mission planning and execution — and autonomous vehicles — which use GNSS and sensors for positioning and navigation and already use AI to make driving decisions in complex environments.
Of course, UAVs are also much in the news these days:
Since the start of the Russian invasion of Ukraine, both sides have been using several hundred UAVs every day. According to the Royal United Services Institute, a British think tank, the Ukrainians are losing some 10,000 UAVs a month on the battlefield. (By way of comparison, the French army currently has a little more than 3,000 UAVs in its arsenal.)
In the United States, the number of companies granted waivers by the Federal Aviation Administration to conduct beyond visual line of sight (BVLOS) operations keeps growing, enabling them to conduct much more efficient monitoring, inspections and mapping of infrastructure.
Following a recent increase in encounters between swimmers and sharks along beaches on Long Island, New York, in July UAVs began sweeping the ocean three times a day to detect danger. On July 14, the state’s governor, Kathy Hochul, announced the allocation of $1 million to purchase 60 new shark-monitoring UAVs.
Also in July, 350 UAVs were lost during a practice light display show in Melbourne, Australia, ahead of a scheduled performance for the opening of the women’s World Cup. The UAVs appeared to stop mid-show and plummet into the Yarra River, most likely due to interference with GPS signals.
On August 30, researchers in Switzerland unveiled a small AI-powered quadcopter UAV that can outfly some of the best human competitors in the world. It whipped its way around an indoor racecourse in a matter of seconds and was able to beat its human rival in 15 out of 25 races, according to the journal Nature.
From mapping coastal areas with airborne lidar bathymetry to delivering medicines, from locating lost hikers to mapping fires, from enhancing the situational awareness of first responders to monitoring invasive plant species, UAVs are quickly becoming ubiquitous and essential.
Meanwhile, in San Francisco, where autonomous vehicles are already ubiquitous, but not everyone considers them essential, an anonymous group of protesters is surreptitiously placing orange traffic cones on some of them, confusing their sensors and rendering them inoperable.
Syntony GNSS has released CERBER, a GNSS receiver embedded in a CRPA solution.
A classic CRPA system consists of embedded GNSS antennas and antijamming treatments. However, CERBER relies on the tight integration of a CRPA treatment (with a 4-array antenna) and the embedded GNSS receiver.
The estimation of GNSS direction of arrival (DoA) is enabled and allows the receiver to check whether those DoA estimations are compatible with GNSS constellations or originate from very few directions. Therefore, users will be able to detect and locate spoofing devices or receivers instantly.
The receivers are also able to constantly recalibrate the chains of reception based on the DoA and GNSS signals.
CERBER’s embedded approach also enables a 6dB power gain in satellites’ directions, the continuity of GNSS signals’ phase when the space-time adaptive processing (STAP) filter is updated, the absence of additional noise that a GNSS receiver would imply with the re-generation and re-digitalization of RF signals and an improved rejection performance when compared to a classic CRPA + independent GNSS receiver solution.
This technology is designed for the protection and the surveillance of civil critical infrastructures, including Galileo’s and EGNOS’ ground segments, airports or any infrastructure requiring precise and resilient GNSS timing.
Clocks are at the heart of GPS. Advances in space-qualified atomic clocks that kept time to within 10 nanoseconds over a day were a key development that made GPS possible. It turns out that GPS must account for both special relativity and general relativity to deliver position at 1-meter level and time at 100-nanosecond level to its users. We’ll use these round numbers as user expectations from GPS.
In the simple engineering analysis below, we consider the problems that would have arisen if the engineers had ignored relativity in their design of GPS. The issues related to positioning and time transfer are distinct, so we treat them separately.
GPS is basically a bunch of synchronized, near-perfect clocks in orbit
It’s a mantra worth repeating: To measure ranges to GPS satellites with meter-level accuracy, the clocks on the satellites must keep time with nanosecond-level accuracy.
The clocks aboard GPS satellites are extraordinarily stable, typically to one part in 1013 over a day, which is another way saying that they could gain or lose on average 10-8 seconds, or 10 nanoseconds, over 105 seconds, which is roughly the length of a day. It’s a simple calculation. Suppose you measure a time interval of length with an oscillator advertised to have frequency f by counting its periods of oscillation. If the actual frequency is (f + Δf ), you’d measure the time interval as (T + Δt). It is easily shown that:
The fractional frequency stability (f / Δf ) is a key parameter. For an oscillator with stability (f / Δf ) of 10-13 over a day, as noted above, we can limit to 10 nanoseconds on average with data uploads to satellites once a day to re-sync the clocks. An error of 10 nano-seconds in time amounts to an error of about 3 meters in range computation and, speaking roughly, an error of about 3 meters in the position computed by the receiver. We can live with that.
Gravitational and motional effects on GPS clocks
Our previous calculation of the timekeeping error of a satellite clock would have been fine had we not overlooked an important fact: We pretended as though the clocks were at rest on Earth at mean sea level. So, let’s see what relativity has to say about clocks in 20,000-kilometer-high circular orbits around Earth. The satellite orbits are not perfectly circular, or identical, but for now let’s pretend that they are. We call that modeling. The clocks would move at a rate of about 4 kilometers per second and exist in an environment where Earth’s gravity is only about one-fourth that at sea level.
According to the theory of special relativity, a moving clock ticks more slowly when compared with one that’s stationary at sea level. A clock aboard a GPS satellite will lose about 7 microseconds per day. That is three orders of magnitude larger than our budget for satellite clock error discussed earlier, therefore we can’t simply ignore it.
According to the theory of general relativity, on the other hand, a clock in a weaker gravitational field will tick faster than one that’s stationary at sea level. Apparently, gravity weighs down time, too. A clock aboard a GPS satellite in a medium Earth orbit will gain about 45 microseconds per day over a clock that’s at sea level on the earth.
The net effect: A GPS satellite clock will gain about 38 microseconds per day over a clock at rest at mean sea level. This effect is secular, meaning the time offset will grow from day to day.
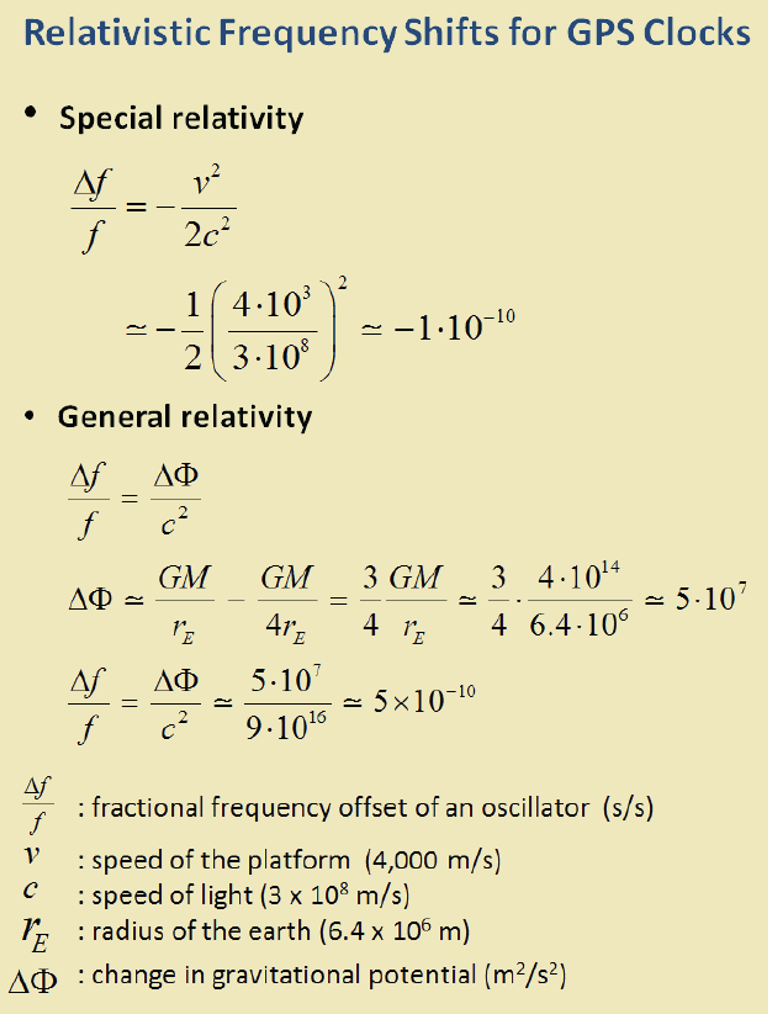
So, you ask: Can you show me how you came up with these numbers, 7 micro-seconds and 45 microseconds? No, but I can point you to the references listed below and I can come close using simple mathematical models: (i) Earth’s gravitational potential is complicated and to simplify things we model Earth as homogeneous in composition and spherical in shape with a radius (rE) of 6,400 kilometers; (ii) aGPS satellite orbit is a circle with radius 4 rE; and (iii) the satellites move at the rate of 4 kilometers/second. We saved ourselves a lot of trouble by agreeing on this simple model.
sidebar
The calculation of the fractional frequency stability (f / Δf ) due to the relativistic effects is now easy and given in the sidebar. The answers are only approximate, but surprisingly close to the numbers cited above. That’s the beauty of good models. To calculate time gained or lost over a day, multiply by the length of a day in seconds.
As an interesting aside, note that the effects predicted by special relativity and general relativity cancel each other for clocks located at sea level anywhere on Earth. Consider two clocks, one located at the North or South Pole, and the other at the equator. The clock at the equator would tick slower because of its relative speed due to Earth’s spin, but faster because of its greater distance from Earth’s center of mass (about 22 kilometers) due to Earth’s flattening. Because Earth’s spin rate determines its shape, the two effects are not independent, and it’s no coincidence that they cancel exactly.
What if GPS forgot about relativity?
What would have happened if the engineers responsible for designing GPS had disregarded relativity? If the GPS satellites were in fact in identical, circular or-bits, their clocks would have shown a puzzling, but identical, behavior of gaining time over clocks of the Control Segment on Earth at a steady rate, about 38 microseconds over a day, the combined effect of special and general relativity.
What would that do to range measurements? A GPS receiver would have meas-ured the ranges to all satellites in view as too short by a common amount (up to about 11 kilometers between daily uploads of clock corrections). However, GPS receivers don’t measure ranges. To measure ranges, the receiver clock would have to be synchronized with the satellite clocks, an onerous requirement. The receivers use inexpensive clocks that drift and have frequency stability no bet-ter than . The receivers measure pseudoranges, i.e., ranges with a common bias on account of the receiver clock offset relative to GPS Time. This bias is es-timated by the receiver, along with its three-dimensional position. The price of an inexpensive receiver clock is that we now have four parameters to estimate and need pseudorange measurements from four satellites.
So, what would that do to positioning? The answer is that the common bias introduced by the relativistic effects would get lumped with the typically much larger bias introduced by the offset in the receiver clock. The position estimate would be unaffected.
Now, what about time from GPS? A GPS receiver used for timing is typically stationary with its antenna location carefully surveyed. In principle, a single pseu-dorange measurement can sync it to GPS Time (and UTC). So, if the relativistic effects had been ignored, the timing accuracy would have suffered to the ex-tent of 38 microseconds per day between updates of the clock parameters. That’s a deal-breaker, considering that we expect 100-nanosecond accuracy.
The relativistic effects discussed so far can be compensated for easily by setting the frequency of the satellite clocks lower (by 0.0045674 hertz) in what’s called “factory offset”: The frequency of a satellite clock is set to 10.22999999543 megahertz so that it will tick in orbit at the same rate as a 10.23-megahertz atomic standard at sea level on Earth. What an ingenious solution!
This factory offset would have accounted for the relativistic effects completely if the GPS satellite orbits were perfectly circular and identical. They are not. You can’t control an orbit perfectly.
So, what about eccentric orbits?
Yes, that’s a complication.
Each orbit is distinct and slightly elliptical. A consequence of this is that the sat-ellite speed is not constant (due to Kepler’s second law): the farther away a sat-ellite gets from Earth in its elliptical orbit, the slower it moves; and the farther away the satellite, the lower is the gravity field. That means the clocks in differ-ent satellites are speeding up and slowing down at different times and at differ-ent rates. The effect for each clock is periodic and quasi-sinusoidal. Averaging the effect over an orbit, we get zero.
For a satellite in an orbit with an eccentricity of 0.02, the net effect is that a clock can be ahead or behind by as much as 45 nanoseconds. The corresponding range error would amount to ± 15 meters. This effect must be accounted for specifically for each orbit. It would require serious bookkeeping on where the satellite has been in its elliptical orbit since the last data upload to sync its clock. It’s a messy business but can be simplified. We’d leave it at that. See ICD-GPS-200C, Section 20.3.3.3.3.1, if you want to see how it is implemented in your GPS receiver.
There is more to relativity than the special theory and general theory. There is the Sagnac effect associated with our rotating reference frames attached to Earth, in which we’d like to determine a position. The principle of constancy of the speed of light cannot be applied in a rotating reference frame, where the paths of the radio rays are not straight lines, but spirals. (Receivers at rest on Earth are moving quite rapidly: 465 meters per second at the equator.) There is also the Shapiro delay associated with the slowing of electromagnetic waves as they near Earth, which amounts to a fraction of a nanosecond. See the refer-ences for more on these topics.
Final thought: Could Einstein have imagined one hundred years ago that a bil-lion people would unknowingly account for the effects of his esoteric theory in their everyday activities?
Refrences
Ashby (1993), “Relativity and GPS,” Innovation column in GPS World
The phrase “positioning, navigation, and timing” (PNT) — widely used in our industry, including on this magazine’s cover — encapsulates a wide range of applications for global navigation satellite systems (GNSS) and for other technologies that provide some or all the same services. Subsumed under “positioning” is one of the most widespread uses of GNSS, which is data collection to make maps, enable geographic information systems (GIS), and populate the databases that power the many location-based services (LBS) applications on smartphones.
Increasingly, GNSS positioning is also integrated with systems for indoor positioning to enable seamless tracking of people, equipment and products, and with a variety of sensors to monitor their status and environmental conditions.
GNSS positioning and mapping will benefit from the advent of G5 cellular networks, which will vastly increase download speeds, decrease latencies and expand connectivity. While it will transform every industry, 5G’s impact will be especially felt in urban settings and pave the way for tomorrow’s smart cities.
In this month’s cover story, we focus on these aspects of GNSS by presenting three brief case studies:
Golf course irrigation planning and construction, using Trimble Catalyst.
Land surveys to update China’s national GIS, using a CHC Navigation LT700 receiver.
Safety with industrial automation
Industrial automation is an extremely wide area,” said Ludger Boeggering, u-blox senior principal segment manager, EMEA Energy & Automation. “It includes process and production automation, where it is used to automate the production environment. In more remote conditions, where it is less time-critical, it is used to understand what happens in the automation environment. Lastly, it is used to remotely supervise and monitor what is happening in such an environment.”
Nowadays, businesses want to monitor their production environment “all the way down to the production of a single device,” Boeggering said. “That’s the area in which we operate.”
One application of industrial automation on which u-blox is increasingly focusing is the safe, connected worker, which can refer to someone inside a building on a factory floor or someone outside, such as on a construction site. Another one is mobile robotics and collaborative robotics.
“Our customers are in all segments and verticals — including electronics, machine manufacturing, oil and gas, transportation, chemical, food, water, paper and energy,” Boeggering said. “It’s really a broad spectrum of industrial companies that are using these tools and products. We are focused on the leading customers in that area and are working with well-known players in the market.”
5G is an umbrella for different flavors of the technology that includes enhanced mobile broadband and ultra-low latency. “There has been much hype about this,” Boeggering said. “In the beginning, everyone focused on low latency and, potentially, high bandwidth. In reality however, customers realized that it would be too expensive to implement it so as to have both.” This led to the emergence of 5G RedCap, which stands for reduced capability. “It covers a bit of the low latency stuff and a bit of the higher bandwidth stuff, but also makes it more cost effective.”
For many applications, such as video and augmented reality, latency is less important than speed. Then there’s the question of reliability. “Nowadays, reliability and availability are the most important issues,” Boeggering said. “If you have an automation process with very high motion, you definitely need high reliability and low latency.”
Factories can now set up their own environment and combine communication technologies, using low latency and many sensors. “For example, on the campus of a chemical factory you have some critical processes that require reliable connectivity,” Boeggering explained. “There, 5G can provide that. At the same time, there are hundreds of thousands of sensors to be connected. This requires a private network environment that can be controlled.”
“The reason for going wireless is less about being mobile and more about being flexible — such as setting up or re-arranging a production line in a very short time,” Boeggering said. “It normally takes a car manufacturer nine to 12 months to set up a production line for a car. It requires a lot of cables and installations. These guys aim to bring that time down to three months. That means that when they are starting to rebuild a construction area, in the best case, they can make the connectivity for all the communications entirely wireless and just plug the machines into the power.”
Construction sites require a solution that provides a seamless indoor-outdoor location. For example, a construction company may want to know the location of all its tools on a large campus. When they are outside, they can be easily located with GNSS. More often, however, they are inside concrete walls. “Nowadays, we don’t really have a solution that covers that indoor-outdoor area seamlessly,” Boeggering said. “On a construction site, you can’t set up an infrastructure to do that. So, you need one that is already available. There 5G might be able to help.”
u-blox can provide solutions that fit across the communication technologies. “5G is not the only technology that will be used in industrial automation environments,” Boeggering pointed out. “We have the portfolio, starting with GNSS when it comes to location, and, when it comes to short range, wireless, Bluetooth, Wi-Fi, and of course, cellular. We are providing to these OEMs the right components to create the final solution, including positioning and communication services.”
“The customers, who want to know where their equipment is, do not care whether that information is derived using GNSS, Bluetooth, or Wi-Fi,” Boeggering said. “They just want to know in which room it is, on which level, or in which area of their factory. Of course, customers certainly would like centimeter precision. However, the question is whether they want to pay for it. GNSS plays a huge role for location outside and close to windows. However, once you can’t get this data, you need an alternative solution. This can be done in combination with any wireless technology. There are use cases in which Bluetooth might work independently from GNSS, but when it comes to Wi-Fi or cellular 5G, GNSS is definitely helping to get the location. So, we always play a role.”
Irrigating the green
“We’ve always used GPS equipment to map out our clients’ properties across the country,” said Michael Kuhn, owner of Michael Kuhn & Associates Inc., in Birmingham, Michigan, which specializes in irrigation systems for golf courses. “Very rarely do they have an accurate base map of the property. So, instead of going to third parties, we decided 20 years ago to buy our own GPS equipment and map these properties ourselves as a starting point to do our design work for new irrigation systems,” Kuhn said.
The Trimble Catalyst. (Image: Trimble)
Since starting his business, Kuhn is now on his third or fourth generation of Trimble equipment. “Convenience and time are always key factors with me,” he said. “As this equipment has evolved, it’s become more user friendly, and more convenient.”
He spends a lot of time on the road and needed a way to collect data on golf courses and get it to his staff back at the office, so that they could clean it up and get it ready for him as quickly as possible. Before Trimble released Catalyst, he had to go back to his hotel, remote into his office computer and transfer the data from his laptop through some kind of cloud-based device. “Now, with this new Catalyst equipment, it is so much more streamlined, and the price point has been fantastic,” Kuhn said. “Everything’s now going subscription-based anyway. Not just software but hardware as well. That allows me to do a few more things that I couldn’t do before.”
The golf courses around the country with which Kuhn works are constantly doing projects and updating infrastructure. “We end up being the gatekeepers for the overall mapping for our clients’ golf courses for infrastructure,” he said.
Before Trimble released Catalyst, Kuhn recalled, some of his clients spent up to $30,000 for equipment that would collect data sufficiently accurate to incorporate into his mapping.
“When Trimble came out with Catalyst and a subscription-based pricing, depending on what kind of accuracy you need, it was a no brainer. The first group that I thought of was my clients — giving them the ability to get entry-level subscriptions, but still be able to maintain centimeter-grade accuracy because they’re using an hourly subscription instead of paying thousands of dollars a year.”
Kuhn also uses aerial photogrammetry.
“Not that long ago, it was tough to get your hands on ortho-corrected aerial photography that could match up with my base maps,” he recalled. “I would typically go to municipalities. More and more of them have GIS departments now. Often, I could get access to ortho-corrected aerial photography from them, either for free or at a cost. It was accurate, but you would be at the mercy of whenever the county was doing its aerial photography,” Kuhn continued.
Then Kuhn came across Nearmap and began to use their aerial photography. “It wasn’t ortho-rectified at all, but they were flying multiple times a year,” Kuhn said. “It was nice to incorporate it into what we were doing, to make sure that I could see the latest and greatest overhead of whatever property I was looking at.” When Nearmap switched to a subscription-based business model, however, Kuhn did not sign up because the images were not georeferenced. “It’s a lot of work when you must manipulate an aerial and get it to match up to a base map. Then, probably two or three years ago, they started to geo-reference their aerial imagery and we signed up and they’ve been great.”
Right now, Kuhn’s equipment is close to centimeter-grade. “We were the first independent irrigation consulting partners to get this three-dimensional hydraulic modeling software to run our irrigation systems,” he said. “In a three-dimensional model, before we even finalized drawing, we were able to model the systems that we were designing that could tell us what pressure drops were across a 500-acre piece of property three dimensionally.” That required a topo map of the property, which he would get from the relevant county.
Pump stations for golf course irrigation systems pump 2,000 or 3,000 gallons a minute across hundreds of acres, sometimes in the mountains and typically full of steep inclines.
Image: Michael Kuhn & Associates Inc.
“It could be in Colorado or Salt Lake City or in a place flat as a pancake, but it is absolutely critical to still have the ability to run that hydraulic model and have accurate data flow horizontally and vertically,” Kuhn said. “With the data that we have now, I can run an irrigation cycle in multiple different ways and tell the end user what the pressure is in the back left corner of a green within 1/100 psi. It’s invaluable.”
Kuhn supports his clients in many ways. “Since the Trimble Catalyst equipment came out, I’ve recommended to my clients and to contractors that they switch to it. Golf course building contractors have always had good equipment, such as total stations, and this was just another tool that they could have to collect data quickly and easily.”
Additionally, Kuhn pointed out, Catalyst provides a sharing platform. “So, I could create a team for a golf course and then they could get the same equipment and create a project and we can make each other part of each other’s team. So, they have access to all the data that they collect and all the data that I collect, to the extent that I give them permission to use them. That’s critical. I mean, sharing data with contractors is another component that we really didn’t have before.”
Collecting data for GIS
Image: CHC Navigation
CHC Navigation is assisting China’s Ministry of Natural Resources to conduct its third national land survey. The ministry regularly organizes nationwide land surveys to update the country’s national GIS database, including spatial and attribute information. In addition, surveyors are required to take multiple high-resolution images of each area in different directions to provide verification information. As the project progresses, all data will be uploaded to a server via a cellular (4G) connection. In terms of accuracy, this project requires an expected accuracy in the order of one meter.
For this project, China’s Ministry of Natural Resources used the CHCNAV LT700 rugged Android tablet. Featuring an 8-in screen viewable in direct sunshine and in high-bright areas, the LT700 is well suited to display GIS data tables, complex vector and raster maps or high-resolution pictures. Unlike consumer tablets, the L700’s IP67 industrial design withstands daily use in harsh environments and conditions. Protected from dust, rain, extreme temperatures and accidental drops from 1.2 m, the LT700 is an advanced solution for such applications as forestry, utilities, asset management or environmental studies. Bearing the Google Mobile Service (GMS) certification, the LT700 runs seamlessly the most common professional data collection applications available from the Google Play store.
The main challenges associated with using data collectors in the field are related to the natural environment and the need to ensure reliable georeferencing accuracy down to the meter. Surveyors and GIS technicians work in a variety of environments, including cities, mountains, plateaus and forests. They can work for up to eight hours in rain, snow and extreme temperatures. As a result, their equipment must be well protected from shocks and bad weather, with long battery life and a high-brightness display.
A GIS specialist collecting the locations of assets using an LT700H RTK Android tablet by CHC Navigation, which has centimeter accuracy. (Image: CHC Navigation)
With the LT700 rugged tablet, surveyors can focus on collecting data in the field without interruptions or wasted time, and without worrying about weather conditions. The device delivers metric accuracy with SBAS support, which greatly improves the reliability of georeferencing and the consistency of collected data, regardless of the operator. Its lightweight construction and convenient size make it easy to transport on foot, especially when working in mountainous terrain or crossing rivers. The LT700’s 4G connectivity has made it possible to continuously update data and organize work sessions based on updated data.
Autonomous vehicles are a truly fascinating innovation. Most modern vehicles on roadways around the world have some level of autonomy, ranging from Level 1 features such as cruise control to Level 5 fully autonomous features such as the ability to monitor roadway conditions and perform safety-critical tasks without intervention by a human driver.
Even though autonomous vehicles have been continually developed and tested for years, adoption has been minimal. According to the University of Michigan Center for Sustainable Systems, a majority of researchers, manufacturers and experts predict widespread adoption of Level 5 autonomous vehicles by 2030 or later.
Several barriers have delayed the adoption of autonomous vehicles, such as concerns about safety, data security and cyberattacks; lack of consumer demand; liability laws and lack of regulatory legislation; and doubts as to their economic viability.
While their adoption is slow, autonomous vehicles have been widely praised for the range of benefits they would provide. According to the U.S. National Highway Traffic Safety Administration, they include: much greater road safety due to features such as advanced driver assistance systems, lidar, cameras, inertial navigation systems and more; greater independence for people with disabilities, senior citizens and low-income individuals; reduced road congestion due to the lower number of crashes and an increase in ride-sharing; and environmental benefits as the automotive industry transitions to all-electric vehicles.
Several technology and automotive companies also have seen the potential benefits of autonomous vehicles for many applications and the potential impact they could have on communities worldwide. In response, these companies have supported autonomous vehicle innovation and adoption by offering new products and working closely with educators, nonprofit organizations and other groups who aim to leverage it to connect the world.
Education meets automated racing
Safran Electronics & Defense, which specializes in resilient positioning, navigation and timing (PNT) solutions, has advanced the adoption of autonomous vehicles with its simulation software while simultaneously supporting current students in their academic pursuits.
To jointly develop future PNT technology and solutions Safran’s Minerva Academic Partnership Program supports partnerships with the academic community by providing its technology for student-led research projects that use GNSS signals. Leisa Butler, the program’s chair, elaborated on its mission: “Collaborating with our customers in academia while advancing PNT education is the program’s core purpose. We provide members with access to our powerful Skydel GNSS simulation engine.”
Safran and auburn university students are pictured with their autonomous F1 race car that competed in the Indy Autonomous Challenge on the Las Vegas Motor Speedway at CES 2023. Auburn students used Skydel, a Safran simulation engine, to improve the capabilities of the car and to learn how to make it safe and reliable on the track. (Image: Safran Electronics & Defense)
As a part of the program, Safran has a long-established partnership with Auburn University’s College of Engineering. Safran and Auburn University students participated in the Indy Autonomous Challenge, which took place on January 7, at the Las Vegas Motor Speedway during the 2023 Consumer Electronics Show. Nine autonomous Formula 1 race cars, representing colleges and universities from around the world, took part in a head-to-head driverless racing competition with some vehicles reaching speeds of more than 190 mph.
Safran has supported Auburn students before, during, and after this challenge by enabling them to leverage its GNSS simulators, such as Skydel and the GSG-8, which are used in the university’s autonomous vehicle lab. Butler said that giving students access to the simulation software prior to the high-speed races helped them troubleshoot and test the vehicles and improve the results.
“Resolving issues in the lab improves safety while saving time and money,” Butler stated. “The Indy car features multiple antennas. Since Skydel can support multiple instances simultaneously, the team can test heading and realistic scenarios in a simulated environment. This is before they race next to other vehicles at high speeds.
Safran also supports the general advancement of autonomous vehicle technology. Positioning and navigating autonomous vehicles involves the use of multiple technologies, including GNSS.
“Skydel is a valuable tool for the autonomous vehicle industry that wants realistic lab testing because it can support multiple, independent trajectories or antenna outputs simultaneously,” Butler said. She also pointed to the importance of developing mitigation techniques against jamming and spoofing.
“Using a simulator with the Skydel engine allows the user to test in all sorts of challenging environments before putting the wheels on the pavement. This lets the user make sure the vehicle is ready for real-world navigation and avoid costly mistakes. It also gives them a chance to practice and develop countermeasures against unintentional interference and malicious actors.”
Butler added that Safran is proud to support students who are helping to develop automated technology.
“Supporting Auburn’s Autonomous Vehicle team is an honor and a privilege. Student research represents the future of our industry,” Butler said. “We are proud to support them and see what they can accomplish with our simulation tools. We are confident that they will be able to gain valuable insights that will help them design, build and test their autonomous vehicles. It is our hope that their hard work will lead to the development of safe, efficient and affordable autonomous vehicles in the future.”
Accelerating mobility
Waymo, based in Mountain View, California, is an autonomous driving technology company. Formerly known as the Google self-driving car project, it was founded in 2009 and aimed to drive more than 10 uninterrupted 100-mile routes autonomously.
Its first fully autonomous ride on public roads took place in 2015, then Waymo became an independent self-driving technology company in 2016. It launched its first public trial of autonomous ride-hailing vehicles, called Waymo One, in Phoenix, Arizona in 2017, and has expanded its completely autonomous ride-hailing service trials to Scottsdale, Arizona, as well as San Francisco and Los Angeles.
The Waymo vehicle fleet also became fully electric this year.
360° Lidar, Radar, and cameras make up most of the technical elements of the fifth-generation Waymo fully autonomous vehicles. They also have redundant steering and braking, backup power systems, redundant inertial measurement systems for positioning, and more. (Image: Waymo)
Driving Change
According to its website, Waymo “represent[s] a diverse set of communities and interests, and we are coming together because we all share the belief that autonomous driving cars can save lives, improve independence, and create new mobility options.”
Some of Waymo’s community partners include Bike MS, the Arizona Council of the Blind, the Foundation for Senior Living, and Mothers Against Drunk Driving.
One community story to note is Waymo’s partnership with First Pace AZ — a supportive housing community for adults with autism, Down syndrome and other types of neurodiversity — to explore how Waymo could aid neurodiverse people.
Eli is a resident of First Place AZ and an adult with neurodiversity. He does not drive and relies heavily on ride-hailing services, carpooling, and the train to get to work and to volunteer. Not all public transportation is always available or accessible at certain hours. Additionally, human-driven rideshare and carpooling services can present bias from drivers and other passengers who do not understand the behavioral nuances of people who are neurodiverse.
To test the autonomous ride-hail Waymo One system, Eli and Natasha Grant, director of workplace and community inclusion at First Place AZ, hailed a ride to a local animal shelter.
After using the Waymo One service, Eli believed Waymo’s technology could help him stay connected to his community, wherever he may live in the future. Grant added that autonomous vehicles provide independence for individuals who may otherwise not be able to go to places to which they want and need to go.
Breaking social barriers
Community partners that fight food insecurity use Cruise’s autonomous vehicles to pick up left over food from businesses. (Image: Cruise)
Cruise is a self-driving car company based in San Francisco, California, and offers driverless rides in San Francisco; Austin, Texas; and Phoenix, Arizona. It was founded in 2013 by Kyle Vogt and acquired by General Motors in 2016.
Cruise first offered driverless ride-share services for its employees in 2017. In early 2020, the company began testing those driverless rides on public roads in San Francisco. Later that year, Cruise switched gears and repurposed a portion of its all-electric autonomous vehicle fleet to deliver meals to the community during the COVID-19 pandemic. It also began self-driving delivery trials in Arizona.
In 2021, Cruise announced plans for international driverless testing and expansion in Dubai and Japan. The next year, it opened its fully driverless service to public riders in San Francisco.
Delivering Hope
Cruise works with several community partners, such as the National Federation of the Blind, the SF-Marin Food Bank, and the San Francisco Giants.
“At Cruise, our commitment to social impact is a vital part of our business and an extension of our mission to improve life in our cities, especially for people underserved by transportation today,” the Cruise website stated.
In June, Cruise partnered with Replate — a nonprofit food rescue platform — to fight food insecurity and food waste in San Francisco and other communities. The partnership aims to use Cruise’s all-electric autonomous vehicle fleet, integrated with a national network of food recovery partnership from Replate, to pick up leftover food from local businesses and deliver it to organizations that help fight food insecurity.
The goal of the partnership is to create a sustainable cycle of food rescue that fights hunger and waste in local communities.
CHC Navigation (CHCNAV) released the LT800H, a rugged and versatile RTK GNSS tablet designed for geospatial and mapping operations in the field.
The LT800H offers users robust outdoor performance, data security and centimeter-level accuracy for a variety of applications, including construction, environmental surveying and any industry in which Android tablets are required.
Featuring a high-performance 1408 channel GPS, GLONASS, Galileo and BeiDou module and a tracking GNSS helix antenna, the LT800H RTK Android tablet offers centimeter-to-decimeter positioning accuracy in challenging environments. It also comes equipped with a 4G modem to simplify connectivity to GNSS RTK network corrections. The technology also offers an eight-hour battery life, allowing users to collect data in the field uninterrupted.
NVS-01 is the first second-generation satellite of the Indian Navigation Satellite System (IRNSS), also known as Navigation with Indian Constellation (NavIC). It was launched into geostationary orbit on May 20. The satellite is placed at 129.6° eastern longitude and will finally replace IRNSS-1G launched in April 2016.
Whereas the first-generation satellites transmit navigation signals in the L5- and S-band, NVS-01 is the first IRNSS satellite also transmitting in the L1-band. The 1547.42 MHz frequency is also used by other satellite navigation systems, including GPS, Galileo, and BeiDou-3. However, a different modulation is used, namely a Synthesized Binary Offset Carrier (SBOC) signal. The IRNSS L1 SBOC signal has data and pilot components with and without navigation data. Data and pilot signals consist of BOC (1,1) and BOC (6,1) components with sub-frequencies of 1.023 MHz and 6.138 MHz. A quadrature multiplexing is applied for the data and pilot components with a power sharing of 41.82% and 58.18%. The navigation message on the IRNSS L1 signal has a different structure compared to those on the legacy L5- and S-band signals. The new L1 navigation message uses an advanced frame structure and forward error correction inherited from the CNAV-2 message of the GPS/QZSS L1C signal as well as a similar orbit model. Among other things, it provides inter-signal corrections for the L1 data and pilot signals with reference to the S band signal for single-frequency L1 band users.
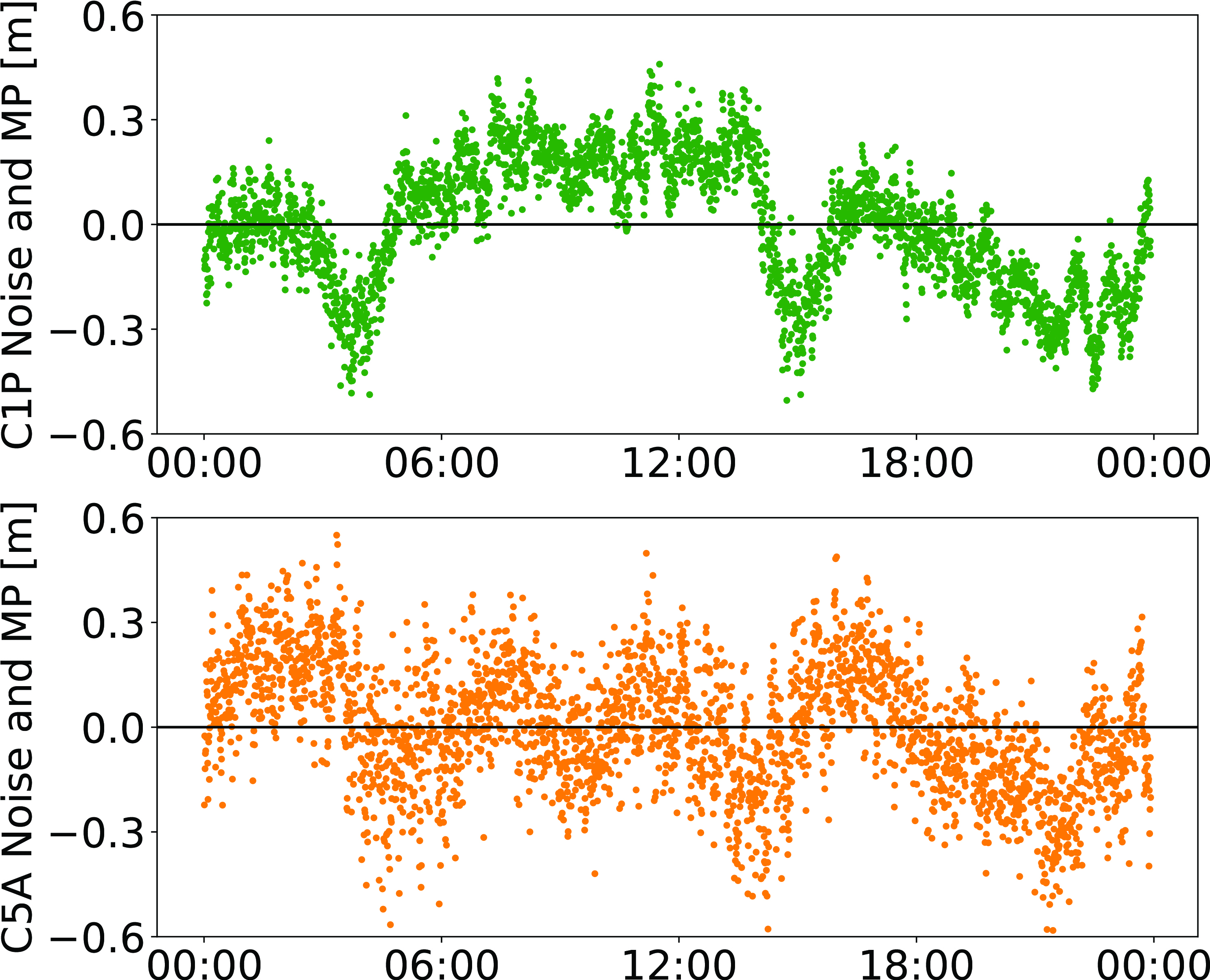
NVS-01 started signal transmission on June 17, 2023, with the pseudo-random noise (PRN) code I10. The satellite’s L1 and L5 signals were tracked by a Septentrio PolaRx5 receiver located in Tokyo, Japan, with a prototype firmware that is capable of tracking the L1 pilot signal. Figure 1 shows the multipath linear combination of NVS-01’s L1 and L5 pilot signals. Whereas the short-term variations are smaller for L1 compared to L5, the overall RMS is 18 cm for both signals.
Figure 1: Noise- and multipath linear combination for NVS-01’s L1 and L5 pilot signals received on 26 June 2023. (Image: All figures provided by the authors)
Whereas IRNSS-1’s rubidium clocks were provided by Spectratime, NVS-01 is the first satellite operating a new type of rubidium atomic frequency standard (RAFS) developed in India. The short-term performance of GNSS satellite clocks can be evaluated with the one-way carrier phase method. The receiver is connected to a highly stable external clock, e.g., a hydrogen maser. Thus, the receiver clock error is negligible. Measurement biases as well as the delays of ionosphere and troposphere on short time scales are removed by fitting a fourth-order polynomial. If no external clock is available, as is the case for the station in Tokyo, the precise clock information can be transferred from another station by a reference satellite jointly tracked by both receivers.
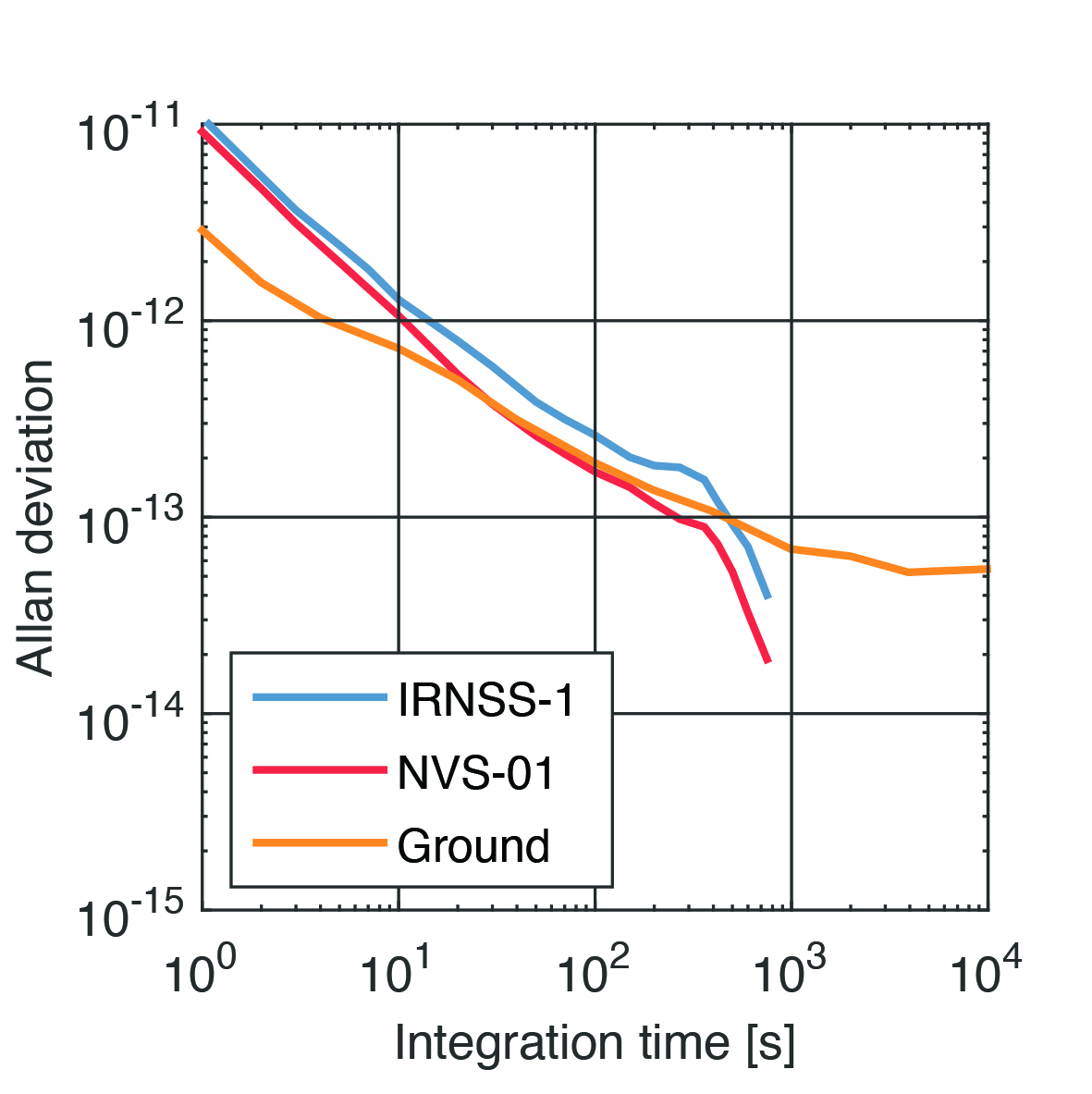
The Allan deviation based on this three-way carrier phase (TWCP) analysis is shown in Figure 2. The hydrogen maser of the IGS station USUD in Usuda, Japan, is used as the reference clock. At short integration times up to 20 s, the Allan deviation computed from the TWCP analysis is dominated by the GNSS measurement noise hiding the true clock performance. Above 20 s, the TWCP demonstrates that the NVS-01’s RAFS stability meets the performance of the ground tests and even exceeds them for longer integration times. At all integration times, the new RAFS outperforms the first generation IRNSS clocks.
Figure 2: IRNSS clock performance obtained from three-way carrier phase analysis as well as ground tests.
Manufacturers
GNSS data used in this article were collected with a Septentrio PolaRx5 receiver.
Peter Steigenberger and Oliver Montenbruck are scientists at the German Space Operations Center of the German Aerospace Center (DLR), where they conduct research in the field of new satellite navigation systems.
Jean‑Marie Sleewaegen is Lead Architect at Septentrio, Belgium, where he has been responsible for GNSS signal processing, system design and technology development since the company’s inception in 1999.
A roundup of recent products in the GNSS and inertial positioning industry from the September 2023 issue of GPS World magazine.
MOBILE
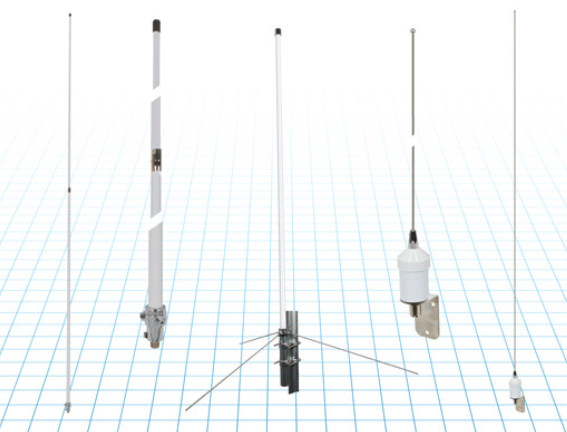
Commercial RF antennas Marine grade for ships/boats
The Fairview commercial RF antennas provide accurate positioning with L1 band and multiband capabilities and offer a 28 dBi gain for reliable positioning. The antennas offer full-spectrum connectivity and operate within the universal marine frequency range of 156 MHz to 163 MHz and CB-27 MHz, 10m-HAM, ensuring unbroken connections at sea. The antennas are also weatherproof, rated IP67 for water ingress. They are offered with three types of mounts, making it easier to integrate into any vessel. All antennas are crafted from robust stainless steel or fiberglass for durability and reliable performance. Various antenna lengths are available for users to select based on their signal performance needs..
Fairview Microwave, fairviewmicrowave.com
SURVEYING & MAPPING
Inertial Measurement Units Features ultra-high accuracy DFOG range and more
The Boreas A90 and A70 are strategic-grade inertial measurement units (IMU) that deliver acceleration and orientation with accuracy, stability and reliability under all conditions with no reliance on GNSS. They also feature automatic gyrocompassing. The IMUs contain ultra-high accuracy digital fiber-optic gyroscope (DFOG) range and high performance closed-loop accelerometers. The Boreas A90 and A70 are both suitable for surveying, mapping and navigation across subsea, marine, land and air applications. The Boreas A90 and A70 also offer an optional license to add inertial navigation system capabilities and enable integration with external GNSS receivers using Advanced Navigation’s range of interfaces and communication protocols. Advanced Navigation, advancednavigation.com
GNSS Receiver Suitable for surveying, mapping, and geographic information system applications
The Mars Laser RTK features a datalink modem that transmits and receives across the full frequency range from 410 MHz to 470 MHz. With adjustable transmit power of 0.5 w to 2 w and a maximum distance of 15 km, it meets the measurement demands of complex environments. It can also switch roles between a rover and a base, enabling more flexibility in demanding applications. The Mars Laser RTK is equipped with a Wi-Fi/4G modem and Bluetooth capabilities, facilitating reliable communication across various platforms. The Mars Laser RTK also features five LEDs on the front panel for satellite tracking, RTK corrections data and more. Powered by the SinoGNSS K8 high precision module, the device supports full-constellation and multi-frequency tracking, including GPS, GLONASS, BDS, QZSS, IRNSS, and Galileo, and supports precise-point positioning service. Additionally, the device tracks more than 60 satellites and has 1,590 channels. The Mars Laser RTK’s third-generation inertial measurement unit (IMU) supports 60° tilt with 2.5 cm accuracy. The IMU can be set to both traditional mode with range pole and to laser mode. ComNav Technology, comnavtech.com
Desktop Solution An Esri ArcGIS Pro add-in for field data collection software
With a streamlined user interface, the Terra Office add-in for ArcGIS Pro enables users to connect TerraFlex workflows directly to the ArcGIS platform from within ArcGIS Pro — Esri’s desktop GIS application. ArcGIS Pro users can now create and manage TerraFlex geospatial data collection projects without leaving ArcGIS. Organizations that collect data in TerraFlex and bring it into ArcGIS through the add-in can also use the Trimble Offline GNSS Corrections service for situations where real-time correction services are intermittent or unavailable. With this service, all data from the field is automatically processed in the cloud without user intervention, and the most accurate real-time or post-processed position is stored for each feature and made available for download through the Terra Office add-in for ArcGIS Pro. Trimble Geospatial, geospatial.trimble.com
Data Capture App A customizable mobile application for GIS data collection
1Capture is a mobile GIS editing application that is multi-use and configurable. It provides accurate and reliable data collection and editing in the field for a multitude of asset, job, and survey types. Customizable rules and actions work to improve data quality at the point of capture. This ensures that good quality data is captured at the source, minimizing re-surveys. The built-in rules engine automatically validates and corrects the GIS and non-GIS data collected, whether working online or offline. 1Capture connects with a variety of GIS environments, including Esri ArcGIS and open-source technologies such as PostGIS and Geoserver. 1Spatial, 1spatial.com/us/
AUTONOMOUS
Heavy-Lift Delivery UAV An off-the-shelf, ready-to-fly delivery aircraft for last mile delivery
The RDST Longtail features a RDS2 drone winch, enabling payloads to be deposited safely from altitude so that spinning rotors are kept far from people and property. The UAV can deliver or retrieve payloads up to 5 kg and over a distance of 11 km, making it suitable for various applications such as local parcel or food delivery, emergency medical deliveries, water sampling programs, offshore logistics, search and rescue operations and more. The UAV can also auto-release packages without the need for a recipient to be present at the delivery location. This is made possible by the all-new bag auto-release mechanism, allowing for easy pickups and auto-releasing of bags during deliveries. Designed to meet FAA regulations, the RDST Longtail is remote ID compliant with a factory-integrated remote ID beacon. The Premium edition of the drone can fly in inclement weather and features a quick-release battery system for minimal downtime. A2Z Drone Delivery, a2zdronedelivery.com
GNSS INS Suitable for multiple applications
The ANELLO GNSS inertial navigation system (INS) is designed for reliable long-term GPS-denied navigation and localization. Powered by optical gyroscope technology and artificial intelligence-based sensor fusion engine, the ANELLO GNSS INS delivers robust, high-accuracy positioning and orientation for applications such as agriculture, construction, trucking, and autonomous vehicles. It comes equipped with unaided heading drift of less than 0.5°/hr, dual multi-band real-time kinematic-capable GNSS engines, ASIL-D-ready automotive qualified CPU, automotive 2-wire Ethernet, and dual high-speed CAN FD interfaces. It also features dual RS-232 interfaces, hardware precision time protocol, IEEE 802.1AS. The ANELLO GNSS INS is IP68 waterproof, as well as resistant to dust, salt spray and chemicals. ANELLO Photonics, anellophotonics.com
GPS-Guided Robot Designed specifically for painting athletic fields
The Turf Tank Two features dual motor drives for enhanced torque and optimized wheels for traction. On its own and controlled through a tablet, the Turf Tank Two can paint a regulation soccer field for two teams of 11 players each in less than 24 minutes, a baseball or softball field in less than 11 minutes, a lacrosse field in less than 26 minutes, and a full 100-yard football field in less than 3.5 hours. It can also paint logos and numbers. The Turf Tank Two is 43 in x 33 in x 22.5 in. It weighs 123 lbs, without paint or the battery installed, and it can hold 5.5 gallons of paint. Enhanced features of the Turf Tank Two also include a revamped sprayer module and advanced control features — including a redesigned front panel that has convenient pause/resume options with LED indicators displaying the robot’s status and a start/stop sprayer button. An LED indicator also comes on the battery. Its batteries are rechargeable. Because of the robot’s precision and accuracy, it uses significantly less paint and eliminates the overspray that is common with either painting by hand or using many of the older paint machines and sprayers on the market. The GNSS-guided Turf Tank Two uses a base station to enhance its accuracy, while its onboard GNSS receiver acts as a rover. Turf Tank, turftank.com
DEFENSE
Solar-Electric HAPS UAS Provides an alternative to conventional sensing and communications systems
PHASA-35 is an ultra-light weight, solar-electric high altitude pseudo satellite (HAPS) unmanned aerial system (UAS) designed as an alternative to conventional systems such as satellites or conventionally powered aircraft for cost-effective imagery and communications. PHASA-35 uses photo-voltaic arrays to provide energy during the day, which is stored in rechargeable cells to maintain flight overnight. The UAS is designed to provide a persistent, stable platform for monitoring, surveillance, communications, and security applications. When connected to other solutions, it provides military and commercial customers with capabilities that are not currently available from existing air and space platforms. PHASA-35 can also be used to deliver communications networks including 5G, as well as provide other services, such as disaster relief and border protection. The UAS also has a flexible payload design that enables a large and varied range of sensor capabilities to be carried and updated. The PHASA-35 is suitable for military communications, military surveillance, commercial communications, maritime surveillance, border security, agricultural monitoring, and environmental monitoring. BAE Systems, baesystems.com
NavGuide is a field-installable replacement to the defense advanced GPS receiver (DAGR), designed for quick integration into current DAGR mounts and accessories without mission interruption. NavGuide features a 3 in, full-color, graphical user interface for dismounted soldiers, and easily integrates with existing mounted platforms and systems. The device leverages the advanced M-code GPS signal with enhanced jamming and spoofing protection. NavGuide is portable, versatile, and precise, and enables vehicular, handheld, sensor, and gun laying applications that enable the military to defeat adversaries in a variety of challenging threat environments. BAE Systems, baesystems.com
OEM
Vertical Location Device For a variety of applications that rely on precise PNT
Pinnacle delivers precise, floor-level, vertical positioning for geolocation applications. It offers altitude measurements that meet the Federal Communications Commission mandate of 3 m accuracy. Pinnacle works with existing barometric pressure sensors in devices to improve quality and accuracy. Pinnacle technology provides z-axis data and has been demonstrated in independent testing to deliver 94% accuracy. Pinnacle data is derived from a proprietary network built for public safety, operated and maintained by NextNav, for wide availability. SDK, API, and Unity plug-in options make it easy to integrate 3D geolocation technology into existing applications.
The device also offers consistent vertical location abilities available throughout large urban areas. Pinnacle is available across the United States, is currently being deployed across Japan, and is being tested in France for local emergency repsonse agencies. NextNav, nextnav.com
LTE-M/NB-IoT Module For small asset trackers
The LEXI-R4 module is customized for size-constrained application requirements. The device is suitable for small asset trackers, such as pet and personal trackers, micro-mobility devices, and luggage tags. The LEXI-R4 module supports all LTE-M and NB-internet of things (IoT) bands, with an RF output power of 23 dBm. It is natively designed to support GNSS AT commands, and its dedicated port enables easy integration with any u-blox M10-based GNSS module, such as the MIA-M10. Additionally, the module can connect to additional positioning services, such as AssistNow and CellLocate. The compact size of the module, measuring 16 mm x 16 mm, results from a 40% footprint reduction in dimensions compared to the previous u-blox SARA-R4. Due to its small size, it leaves room for larger antennas, which can improve RF performance, or for larger batteries. Another feature of the LEXI-R4 is its 2G fallback capability. Whenever LTE-M/NB-IoT coverage conditions are not optimal, it continues to function by falling back onto a 2G network. The company said this feature could be helpful in countries where LTE-M/NB-IoT networks have yet to be fully deployed. u-blox, u-blox.com
The U.S. Department of Transportation (DOT) has unveiled its Complementary Positioning Navigation and Timing (CPNT) Action Plan, which contains steps the department is taking to drive CPNT adoption across the United States transportation system and within other critical infrastructure areas. This plan was mentioned by Robert Hampshire — Deputy Assistant Secretary for Research and Technology and Chief Science Officer, U.S. DOT — during his keynote address at the annual Civil GPS Service Interface Committee (CGSIC) meeting on September 12, at ION GNSS+, which GPS World’s Editor-in-Chief, Matteo Luccio, is attending.
In 2020, the U.S. DOT Volpe National Transportation Systems Center conducted field demonstrations of various PNT technologies that could offer complementary service if GPS is disrupted. The department was able to gather information on PNT technologies at a high technology readiness level that can work in the absence of GPS.
The U.S. DOT have selected 11 candidate technologies to demonstrate positioning or timing functions:
Two vendors demonstrated low-Earth orbit satellite PNT technologies — one L-band and one S-band;
two vendors demonstrated fiber-optic timing systems, both based on the White Rabbit Precision Time Protocol;
one vendor demonstrated localized database map matching database, inertial measurement unit, and ultra-wideband technologies; and,
six vendors demonstrated terrestrial radio frequency PNT technologies across low frequency, medium frequency, ultra-high frequency, and Wi-Fi/802.11 spectrum bands.
Five of the selected technologies were demonstrated at Joint Base Cape Cod in Massachusetts, and six were demonstrated at NASA Langley Research Center in Virginia. The demonstrations were scenario-based implementations modeled on critical infrastructure use cases under different operating conditions.
Two central recommendations from the demonstration were made: the U.S. DOT should develop system requirements for PNT functions that support safety-critical services; and the U.S. DOT should develop standards, test procedures, and monitoring capabilities to ensure that PNT services, and the equipage that utilize them, meet the necessary levels of safety and resilience identified in recommendation one.
The U.S. DOT has also released a request for information (RFI) as one of the steps in driving adoption of complementary PNT services to augment GPS. The department is planning a resiliency test, evaluation, and performance monitoring strategy for PNT-dependent transportation systems.
If any readers are interested in participating, click here for more information.
ComNav Technology Ltd. has introduced the Mars Pro Laser RTK, the latest addition to its Universe Series GNSS receiver lineup, which includes the Venus Laser RTK and Mars Laser RTK. This GNSS receiver is suitable for land surveying, GIS, and construction industries with its innovative features.
The Mars Pro’s laser mode helps in signal-blocked, hard-to-reach or hazardous areas, where conventional GNSS receivers struggle. By switching to laser mode, users can effortlessly use the laser distance meter on the back of the Mars Pro to determine the distance between the receiver and the point. The effective distance of the laser is up to 10 m, ensuring signal-friendly accuracy even in GNSS-challenged places, such as in a garage, under a bridge, over the water, or in traffic.
Additionally, the integrated inertial measurement unit sensor provides up to 60°tilt compensation, ensuring efficiency and accuracy in conventional mode and laser mode.
The Mars Pro has full-constellation capabilities with 1,668 channels across GPS, GLONASS, Galileo, BDS, QZSS, and IRNSS. Support for precise-point positioning service ensures rapid fixing. Its OLED color screen also offers real-time data visualization, enhancing operational control.
The Mars Pro supports communication via Wi-Fi, 4G, and Bluetooth, enabling easy data exchange and interaction. It’s compatibility with mainstream brands and multiple protocols makes it versatile and multifunctional. It can transition between roles as a rover and a base and collaborate seamlessly with users.
In 1973, on March 1, Xerox launched the Alto, the first computer designed from its inception to support an operating system based on a graphical user interface; on April 3, Martin Cooper of Motorola made the first cellphone call, from 6th Avenue in New York City; and TCP, Ethernet, and fiber optics were created.
That same year, over Labor Day weekend, a dozen people in a small conference room on the top floor of a nearly deserted Pentagon, at a meeting called and chaired by Brad Parkinson that became known as “Lonely Halls,” made the key design choices for the Global Positioning System. None of those fundamentals have changed in the intervening half century, during which GPS was developed, launched, and modernized and became a worldwide utility underpinning many critical economic sectors — including precision agriculture, financial services, location-based services, mining, surveying and telecommunications.
At the time, Parkinson — a United States Air Force colonel with a Ph.D. in astronautical engineering from Stanford University, three years of experience in inertial guidance, and 26 combat missions in AC-130 gunships — was the first director of the GPS Joint Program Office in Los Angeles. As he and his co-authors recalled in a detailed two-part history of GPS (see the May and June 2010 issues of GPS World), the aspects of GPS that were defined at Lonely Halls included:
Simultaneous passive ranging to four satellites in inclined orbits, ensuring user equipment would not require a synchronized atomic clock.
A signal structure using CDMA modulation, including both a precision military code and a clear acquisition one that would be freely available to civil users worldwide.
Two GPS broadcast frequencies in the L band.
A family of user equipment prototypes, including a low-cost set that would demonstrate civilian use.
I recently asked Parkinson how GPS today differs from the design that came out of the Lonely Halls meeting. “The fundamental answer is that it’s identical,” he said, “in terms of design, the atomic clock, the CDMA signal, and four satellites to eliminate the need for a user clock. What has been evolving, of course, is that we’ve added another frequency and several new signals, including those for the military and L1C.”
From the very beginning, Parkinson encouraged civilians to use the system, correctly predicting that “they would apply their research and design talents to drive the size, weight and power requirements of the receivers down and the family of applications up,” he said. “That’s exactly what happened, in my opinion.”
Which applications surprised him the most? “Our revolution has been enabled by the advent of integrated circuits in terms of size and cost,” he said. For example, RTK has now given dynamic users access to centimeter accuracies.
“We were driven by visions of the many beneficial applications of GPS; visions that were not yet shared by the Air Force. GPS is a testimony to my team’s engineering competency, their tenacity, and their resourcefulness. I, and the whole world, owe them a large debt for the benevolent revolution they created.”
Beep Inc, a provider of autonomous shared mobility solutions, and Oxa, an autonomous vehicle software developer, have partnered to deploy autonomous vehicles driven by Oxa in the United States. The collaboration marks Oxa’s entry into the U.S. market.
Under the partnership, Oxa’s autonomy software will be installed in a variety of vehicle types operated by Beep, from current passenger shuttles to future vehicle platforms.
The Oxa Driver is a software platform that combines sensor data from cameras, lidar, and radar to gain a more comprehensive view of the world around it when compared to vehicles that rely on cameras alone. This software uses AI to accurately sense and predict changes to the vehicle’s environment while learning from previous journeys.
Two of the Beep shuttles featuring Oxa software are currently operating at the recently opened SunTrax test facility in Auburndale, Florida, — the first location in the United States specifically designed for connected autonomous vehicle and standard automotive testing in a single site.
Oxa is using the facility to showcase its passenger transportation solution ahead of public availability in late 2023.