Your subscription to GPS World unlocks relevant and timely coverage with unmatched print and digital design.
GPS World strives to captivate, educate and continuously inform readers like you by focusing on technical, practical and ever-changing applications.
For the past 36 years, our market-segmented topic areas, deep-dives, as well as broad bird’s-eye-view industry coverage is what makes it a valuable resource for professionals in every tech field.
Your GPS World subscription offers:
■ The long-standing monthly print GPS World magazine
■ The regularly updated GPSWorld.com website, with plenty of free content and unlimited access, plus premium features available free to account holders
■ An interactive, downloadable and browser-based flip-through GPS World digital edition format
■ The breaking news and industry overview weekly Navigate! e-newsletter, conveniently delivered regularly to the email inboxes of professionals worldwide
■ Several market-sector e-newsletters focusing on specific topic areas such as autonomous, defense and surveying technologies
You can update your subscription anytime. Whether you want to change your address, sign up for e-newsletters or update your contact information, all you need is your subscription account number. Rest assured, when you subscribe to GPS World, your information will never be shared or sold.
Keeping your information up to date will ensure you won’t miss an issue.
Our editorial team reports on current, relevant industry topics — including the latest disruptive tech and current events affecting the industry — in print and online.
They also cover positioning, navigation and timing (PNT) technology and developments, which work with GNSS to achieve greater accuracy, availability, integrity and robustness. These include inertial sensors, eLoran, lidar, electronic compasses, cellular signal positioning, video signal positioning, odometers, wheel-speed sensors, ultra-wideband, RFID, Bluetooth and more. Coverage not only includes the U.S. Global Positioning System, but it also chronicles the development of GLONASS, BeiDou and Galileo, as well as regional sysems, including QZSS and NavIC.
In this current era of heightened GNSS interference, we are also staying on top of the numerous groundbreaking projects to complement GNSS or provide alternative PNT methodologies. From new ways to process signals to additional constellations in low-Earth orbit, we are your companion to sharing this critical information (see Converging on the Jammer).
Uses of GPS have spread across the landscape, the seas, into air space, into outer space, driven by designers and engineers crafting new solutions for challenging problems. Wherever the industry is heading, GPS World will be there to cover it.
The AsteRx EB offers high-accuracy positioning and GNSS heading for industrial robots, port logistics, marine and scalable automation applications. Its IP67 enclosure protects the receiver from harsh weather conditions, while built-in advanced GNSS+ algorithms ensure reliable operation in environments challenging for GNSS, such as areas with foliage or near GNSS interference sources. The RAIM+ integrity monitoring system ensures truthful positioning — essential for autonomous navigation. The compact enclosure of AsteRx EB enables easy installation, reducing time-to-market. In a dual-antenna configuration, AsteRx EB delivers sub-degree GNSS heading for systems that require orientation in addition to RTK positioning. The built-in AIM+ anti-jamming and anti-spoofing technology protects the receiver from intentional or unintentional GNSS interference.
The Facet FP is a high-precision GNSS receiver designed to deliver centimeter-level accuracy with a focus on long-term flexibility, ease of use and open-source innovation. It combines multi-band, multi-constellation GNSS support with fully open-source firmware — the platform can adapt as technologies advance. Built to last, all models are contained in a robust waterproof cast-aluminum housing, with an internal structure designed for compatibility with the company’s Flex system of GNSS modules. This gives users the choice between three different modules, plus the choice of having tilt-compensation, offering six different options with a range of price points, securities and accuracies for various needs and applications.
The A65 GNSS antenna delivers exceptional accuracy, interference protection and robust GNSS tracking performance. Designed as a drop-in replacement for the widely deployed A45 antenna, the A65 offers users a seamless upgrade path to the latest precision technology. The industry collaboration reflects a shared focus on combining advanced RF design with real-world application insight to address increasingly complex GNSS operating environments, with both teams working closely from the earliest stages of development to meet demanding original equipment manufacturer (OEM) performance requirements. The antenna architecture, including the stacked patch quad feed element and RF front end, provides Calian’s XF Filtering. Hemisphere GNSS contributed application expertise, system integration requirements and performance validation within real-world machine control, agriculture, marine and survey environments.
Airborne Lidar
Long-range for UAV mapping and aerial surveillance
AlphaAir 6 is mounted on the X500 UAV during an urban mapping mission. (Credit: CHC Navgation)
The AlphaAir 6 airborne lidar system is designed for UAV-based laser scanning, drone lidar mapping and aerial surveying in high-relief and complex terrain. Combining prism scanning technology with a high-grade inertial navigation system (INS), the AlphaAir 6 delivers a maximum ranging capability of up to 2,100 m and supports efficient data capture at typical flight altitudes of 400 m to 600 m above ground level. It integrates an upgraded laser engine and a high-grade IMU with 0.3°/h bias stability to improve trajectory accuracy and point cloud quality. This design removes the need for pre-mission IMU calibration and supports stable, efficient data collection for topographic mapping, corridor mapping, and wide-area aerial survey workflows. It is available in single-camera and dual-camera configurations.
The FastXY mapping application for iOS and Android enables standard mobile devices to serve as professional-grade data-collection tools for geospatial information system (GIS) and architecture, engineering and construction (AEC) professionals. FastXY allows users to collect point, line and polygon data with devices they already own. It delivers advanced capabilities including 3D basemaps, construction staking, topographic surveying, on-the-fly datum transformations, and survey-grade elevations. A built-in Bluetooth data parser allows users to configure the app to collect data from any instrument supporting BLE Bluetooth or RS-232 — echosounders, radiation sensors, laser rangefinders, barcode scanners — and marry that data with precise GNSS coordinates.
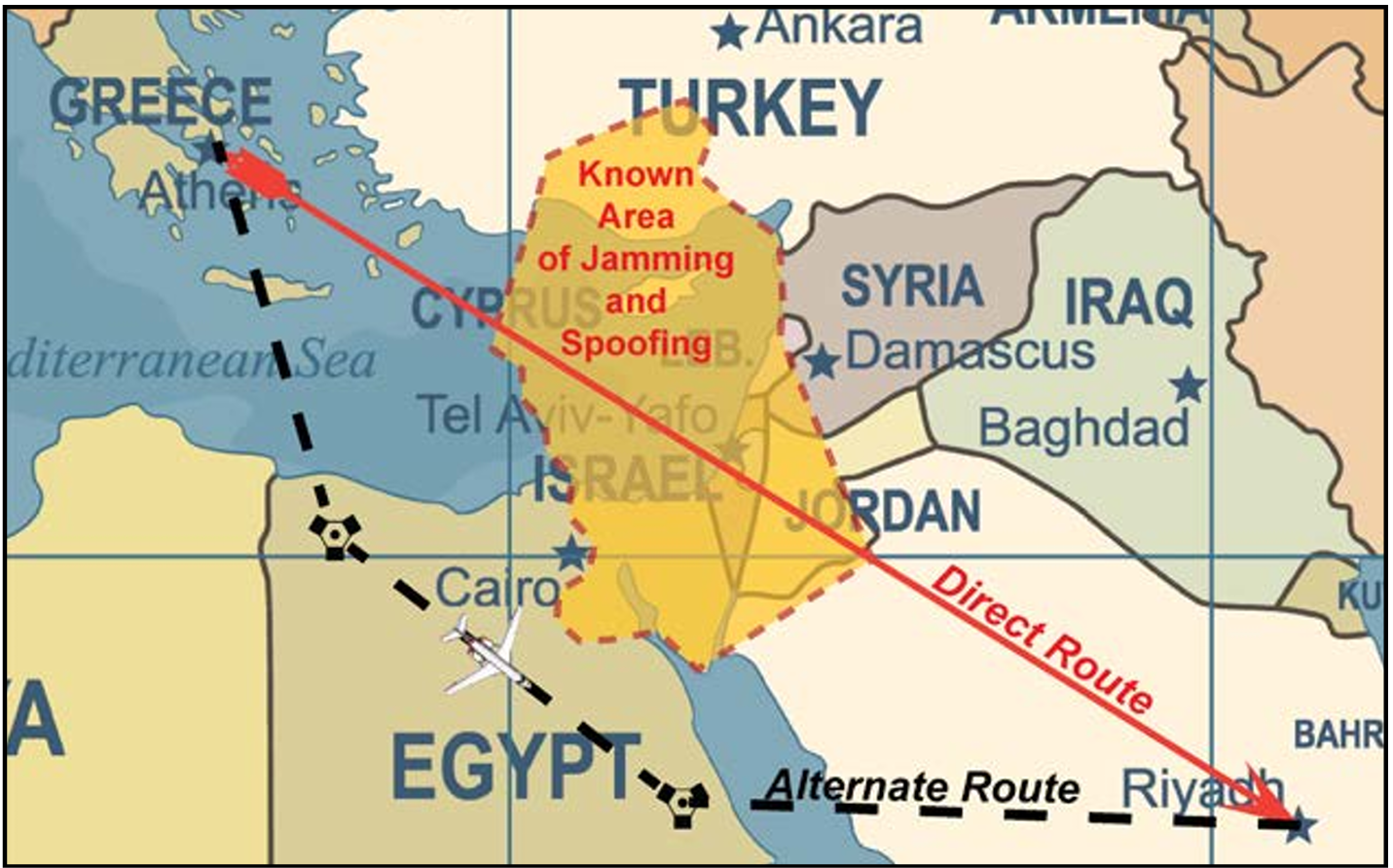
The U.S. Federal Aviation Administration (FAA) has updated its “GNSS Interference Resource Guide.” The FAA’s Flight Technologies and Procedures Division (AFS-400) developed the guide to provide operators and pilots with current information on GPS/GNSS jamming and spoofing. According to the guide, “As the threat of GNSS jamming and spoofing is constantly changing, the FAA will update this resource guide to provide the best guidance in the rapidly changing environments.”
UK scientists unite to uncover coastline mysteries
The research vessel Cefas Endeavour at dock in Lowestoft.(Credit: Cefas)
The UK Centre for Seabed Mapping (UK CSM) conducted a survey to explore and map the seabed along the United Kingdom’s southwest coastline. For four weeks, a team of 26 maritime scientists collected hydrographic, geological and environmental data. According to UK CSM, the survey represents an unprecedented level of collaboration within the maritime sector. The team aimed to collect and share high-quality marine data and make advances in how the seabed is mapped, understood and managed. The findings will support a wide range of applications including offshore energy and infrastructure, marine ecosystem science, safety at sea, marine policy, and defense.
Bangladesh at the top
Credit: MD Maruf Hassan/E+/Getty Images
In April, field teams for the Survey department under the Ministry of Defense conducted field work in the remote hill areas of Bangladesh to determine the highest peak. Surveyors used modern geodetic methods and advanced GNSS technology in the Bandarban district, and followed international standards to determine the height of the country’s highest peak above mean sea level (MSL) with centimeter-level accuracy, including latitude, longitude and elevation.
Turbulence shrinks Antartica’s Ross Ice Shelf
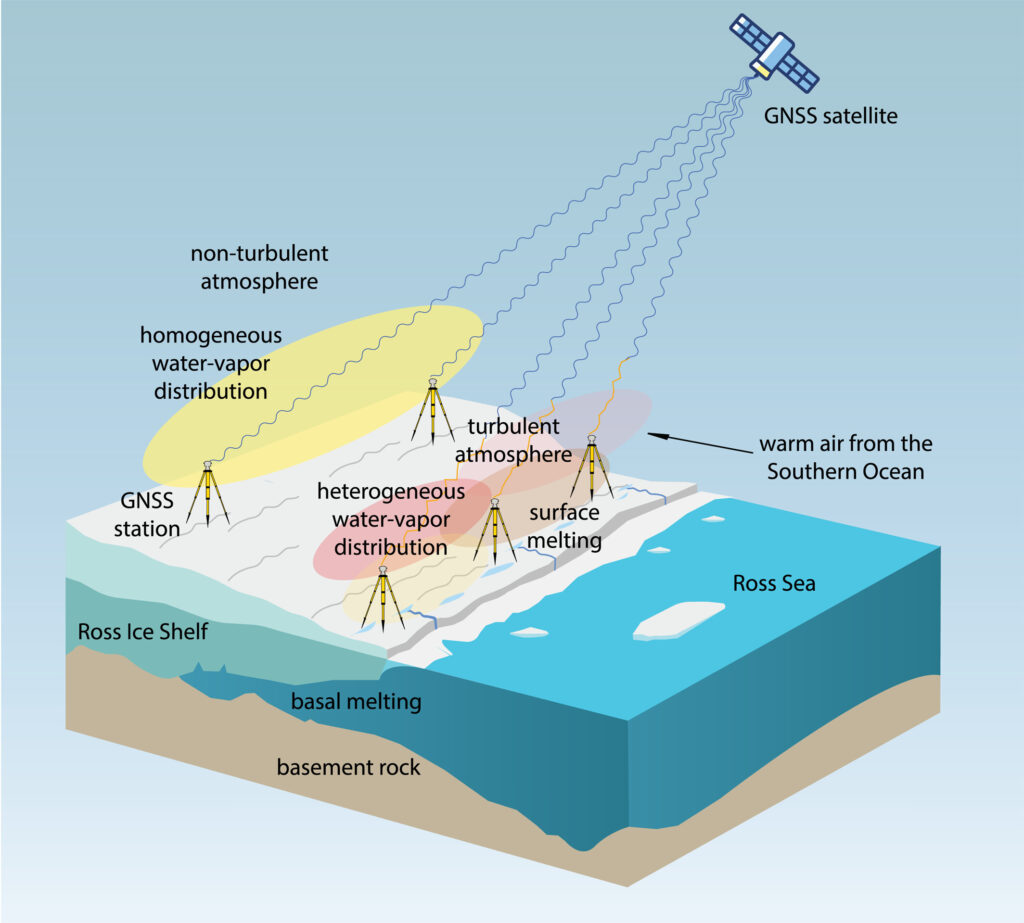
Sketch (not to scale) of GNSS sensitivity to atmospheric turbulence in Antarctica (Credit: MIT)
GNSS observations suggest a major melting event at Antarctica’s Ross Ice Shelf was linked to atmospheric turbulence. While the shelf typically melts underneath from warm ocean water, an unusual surface melting episode occurred in January 2016. Researchers from MIT Haystack Observatory used data from existing GNSS stations, with 13 stations installed on the shelf, to examine atmospheric turbulence. Wind, water vapor and temperature variations drawn in by warm and humid air caused the surface to melt, with turbulence four times greater than usual.
On a January morning in 2026, a GPS jammer powered up near Shiraz, Iran. It was not the first, and it would not be the last. The Strait of Hormuz corridor has become one of the most persistently jammed airspaces on Earth. But this time, two satellites were watching from very different vantage points, and together they would demonstrate something new: that spaceborne sensors can localize a terrestrial GPS jammer to within a few kilometers, using physics alone.
This article presents the first direct comparison of Cyclone Global Navigation Satellite System (CYGNSS) — a NASA GNSS reflectometry constellation — and NASA-ISRO Synthetic Aperture Radar (NISAR) — an L-band synthetic aperture radar for GPS jammer localization. The results challenge assumptions about which modality performs better and reveal that the answer depends on a question most analysts forget to ask.
The setup: Known jammer, known position
Validation requires ground truth. With help from the PNT community, we identified a GPS jammer operating near 27.32°N, 52.87°E (approximately 50 km southwest of Shiraz) that was active on Jan. 8 and Jan. 20, 2026, with confirmed quiet periods on Dec. 15 and Dec. 27, 2025. The jammer’s position was established through independent signals intelligence.
This gave us a controlled experiment: two “jammer ON” dates and two “jammer OFF” baseline dates, with satellite coverage from both CYGNSS and NISAR spanning the full period.
Two satellites, two physics
CYGNSS is a constellation of eight microsatellites that measure GPS signals reflected off Earth’s surface. Each spacecraft carries a delay-Doppler receiver that maps reflected signal power across a grid of delay and Doppler bins, known as the delay-Doppler map, or DDM. When a terrestrial jammer is active, it floods the GPS band with noise, elevating the DDM noise floor and suppressing the coherent surface reflection. The effect is detectable hundreds of kilometers from the jammer, creating a wide-area footprint in the reflected signal data.
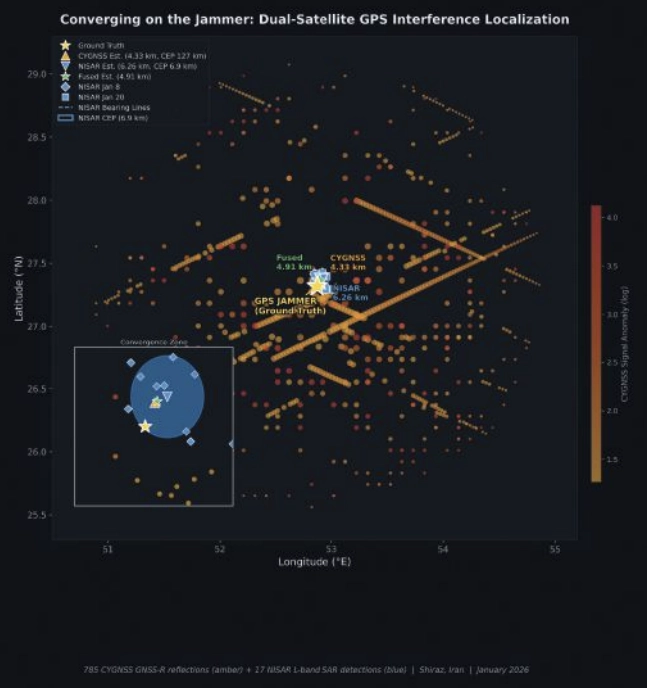
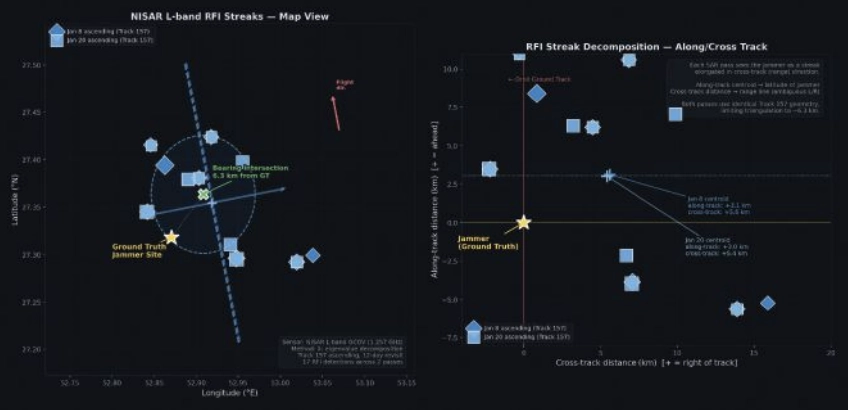
FIGURE 1 Jammer localization tracks from both CYGNSS and NISAR satellite constellations. (All figures by Sean Gorman)
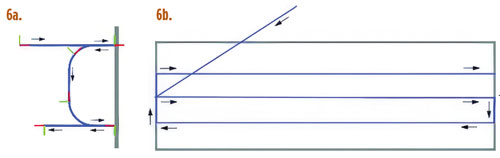
NISAR operates an L-band SAR at 1.257 GHz, just 30 MHz from the GPS L2 frequency at 1.2276 GHz. When a GPS jammer’s broadband emissions leak into NISAR’s receive band, they create characteristic streaks in the SAR imagery. The streaks are elongated in the cross-track (range) direction, not along-track, a counterintuitive result that follows directly from SAR signal processing. In azimuth (along-track), the jammer is a fixed-point source with a valid Doppler history, so the SAR azimuth processor focuses it correctly, similar to any ground target. But in range (cross-track), the jammer’s broadband noise does not match the SAR’s chirp waveform, so range compression smears the energy across many range bins rather than compressing to a point. The result is a streak perpendicular to the flight direction, whose along-track centroid encodes the jammer’s latitude and whose cross-track extent encodes a range arc, which is the distance from the orbit ground track (FIGURE 1). The bearing of each streak encodes the jammer’s direction relative to the satellite’s ground track.
FIGURE 2 Crosstrack visualization for NISAR RFI streaks.
The two sensors could hardly be more different. CYGNSS sees the jammer’s effect on reflected GPS signals, offering an indirect measurement spread across hundreds of specular reflection points. NISAR sees the jammer’s emissions directly in its own receiver, which is a more precise measurement, but only along the satellite’s narrow ground track. FIGURE 2 shows both detection sets converging on the jammer location.
CYGNSS: 785 Detections, 4.33 km Error
We processed all CYGNSS Level 1 data within 200 km of the jammer location on both ON and OFF dates. Four detection methods contributed observations:
■ DDM noise floor (419 detections): The pre-computed ddm_noise_floor variable, calibrated against the thermal noise reference, proved the strongest discriminator. Near-jammer values exceeded 15,000 counts against a ~10,000 mean background.
■ Spatial noise grid (299):A 10 km gridded analysis identified cells with anomalously elevated noise relative to adjacent cells.
■ SNR hole detection (66): Coherent surface reflections were suppressed near the jammer, creating spatial “holes” in the SNR field.
■ NBRCS drop (1): Surface reflectivity dropped approximately 16% near the jammer, though this method produced few threshold exceedances.
Across four DDM channels per spacecraft and multiple passes, this yielded 785 total anomalous observations on the jammer-ON dates.
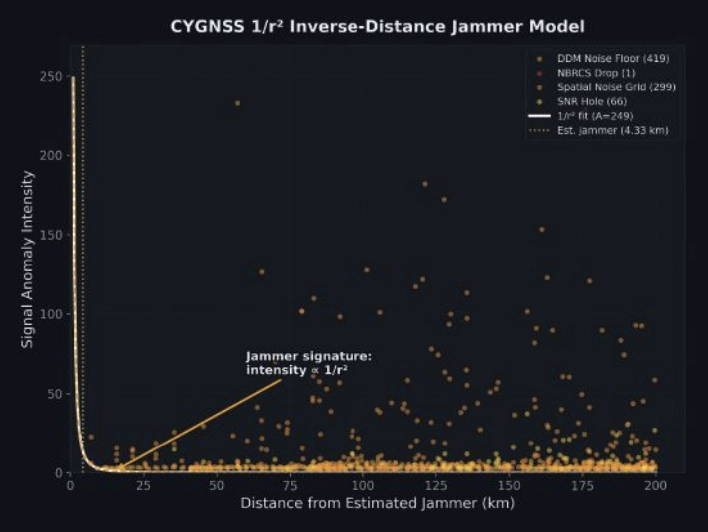
FIGURE 3 Scatterplot of interference insensity versus distance for CYGNSS.
Localizing using a simple centroid of all 785 detection positions placed the jammer 32.1 km from truth, with too many distant, low-SNR detections diluting the estimate.
Instead, we fit a parametric 1/r² inverse-distance model:
I(r)=Ar2
where A is a free amplitude parameter and r is the distance from a candidate jammer position. We jointly optimized the jammer position and amplitude using SciPy’s Nelder-Mead optimizer across all 785 observations, weighted by intensity. The optimizer converged on a position 4.33 km from ground truth, providing a 27.7 km improvement over the centroid (FIGURE 3).
The baseline: Zero false positives
On the jammer-OFF dates (Dec. 15 and Dec. 27, 2025), the pipeline produced exactly zero detections using the same thresholds, geographic area and satellites: a completely clean result. This suggests that the 785 detections are unlikely to be sensor artifacts or geographic anomalies. They disappear when the jammer turns off.
NISAR: 17 Detections, 6.26 km Error
NISAR’s approach is fundamentally different. Rather than measuring hundreds of reflected signals across a wide area, it captures direct emissions in a narrow swath, but with far greater geometric precision.
We processed NISAR L2 GCOV (geocoded covariance) products from Track 157, Frame 15 (ascending) for three dates: the Dec. 27 baseline and the Jan. 8 and Jan. 20 jammer-ON passes. The detection pipeline used eigenvalue decomposition of the polarimetric covariance matrix:
λ₁ ratio thresholding: In jammer-contaminated pixels, the dominant eigenvalue λ₁ of the 2×2 [HH, HV] covariance matrix rises sharply relative to the scene mean, indicating an unpolarized additive source.
Cross-polarization ratio (HV/HH): GPS jammer emissions are unpolarized, disproportionately elevating the HV channel. Anomalous HV/HH ratios flag contaminated azimuth lines.
Iterative outlier trimming: Three rounds of 1.5σ clipping removed scattered false detections, leaving 17 high-confidence streak centroids.
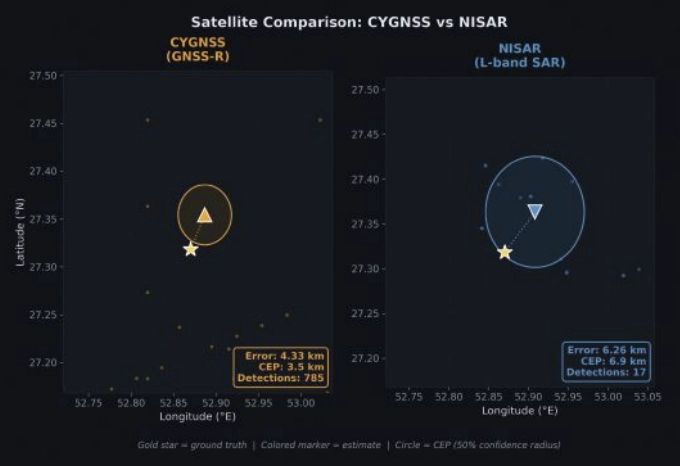
FIGURE 4 Error and CEP Metrics Comparison for CYGNSS and NISAR.
With detections from two passes on different dates, we had two independent bearing lines. Each pass’s streak centroids defined an azimuth aligned cluster whose major axis pointed toward the jammer. A PCA fit to the two clusters extracted the bearing: 308.1° from the Jan. 8 pass and 316.2° from Jan. 20. Their intersection — computed via scipy optimization of the angular residual — landed 6.26 km from ground truth (FIGURE 4).
The along-track/cross-track decomposition reveals why the 6.26 km error is a geometric ceiling for this dataset, not a processing limitation. Both passes come from the same Track 157 ascending orbit on a 12-day repeat cycle. The intensity-weighted along-track centroids land at +3.0 km and +3.1 km north of the jammer, a direct stable latitude measurement. The cross-track centroids land at +5.4 km and +5.6 km east of the orbit ground track, a range measurement. But because both passes share identical orbit geometry, the two range arcs are nearly parallel. The bearing difference between passes (308.1° vs 316.2°) is only 8.1°, producing a shallow intersection angle and poor cross-range resolution. A single descending pass, which would cross the ascending track at approximately 60-70°, would transform the geometry from two near-parallel lines to a genuine triangulation, potentially reducing the localization error to sub-2 km. Unfortunately, no descending NISAR pass covering this jammer site was available in the beta archive, which ends on Jan. 20, 2026.
The CEP (circular error probable, the radius containing 50% of repeated estimates) was 6.88 km, meaning if we ran this analysis on many similar jammers, half our estimates would fall within ~7 km.
Who wins?
CYGNSS wins, and not just on accuracy.
A naive confidence metric for the 1/r² fit would be the scatter of the 785 input detections (CEP = 127 km). But the detections are not the estimate; they are the inputs to a model fit. The relevant confidence question is: How stable is the fitted position?
We answered this with a 500-iteration bootstrap: resample the 785 detections with replacement, re-run the 1/r² optimizer each time and measure the spread of the resulting position estimates. The bootstrap CEP, the median radial distance across 500 fitted positions, was 3.48 km. The optimizer converges stably to within a few kilometers of the same location regardless of which detections are included.
This means CYGNSS achieves 4.33 km error with 3.48 km confidence, both better than NISAR’s 6.26 km error and 6.88 km confidence.
The bootstrap CEP also reveals what the raw scatter obscures: the 1/r² fit is constrained primarily by the ~80 high-intensity detections within 30 km of the jammer. The remaining 700 distant, low-intensity detections contribute little to the position estimate — they are correctly downweighted by the intensity-weighted least squares. The fit’s stability comes from the physics: a 1/r² signal has steep gradients near the source, providing strong positional constraints where it matters most.
Bayesian fusion: Can we get both?
The obvious next question: Can we combine CYGNSS’s wide-area sensitivity with NISAR’s geometric precision? We implemented four fusion strategies, all designed to work without ground truth:
■ Bayesian Gaussian posterior: Model each sensor’s estimate as a 2D isotropic Gaussian with σ = CEP/1.1774. The posterior is the product of the two Gaussians: an analytical precision-weighted mean.
■ NISAR-prior constrained 1/r²: Re-run the CYGNSS optimizer with a Gaussian regularization term pulling toward the NISAR estimate, sweeping the regularization weight λ from 0.01 to 10.
■ NISAR-proximity re-weighted 1/r²: Apply a Gaussian kernel centered on the NISAR estimate to the CYGNSS detections before fitting, effectively upweighting observations consistent with the SAR result.
■ Joint CEP-balanced: Combine the CYGNSS gradient signal with NISAR cluster proximity, weighted by (σ_CYGNSS/σ_NISAR)².
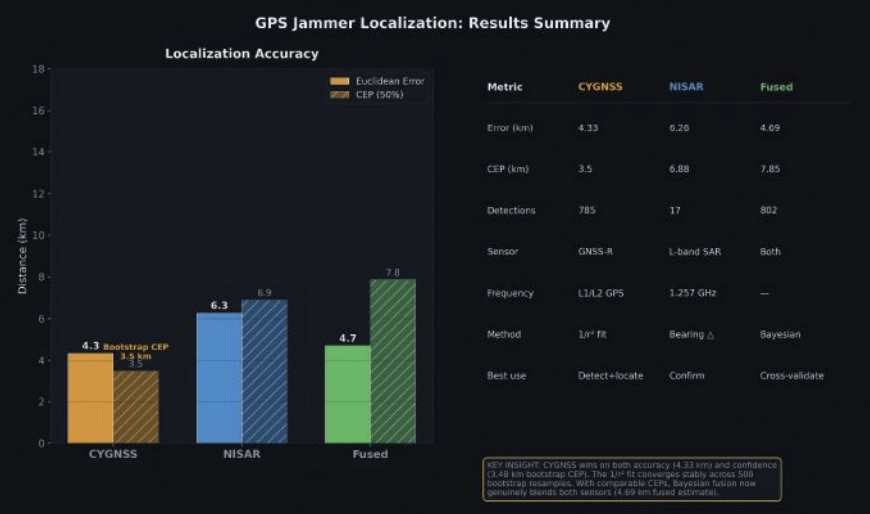
FIGURE 5 Summary statistics for jammer localization with CYGNSS, NISAR and fused approach.
With the bootstrap CEP, the precision ratio flips. The CYGNSS Gaussian (σ = 2.95 km) is now 2× tighter than NISAR (σ = 5.84 km). The Bayesian posterior, the precision-weighted mean, lands at 4.69 km, pulling toward CYGNSS’s better estimate while incorporating NISAR’s independent geometric constraint. FIGURE 5 shows the fusion: two comparable Gaussians whose product is tighter than either alone.
The fused result (4.69 km error, 7.85 km CEP) is not quite as accurate as CYGNSS alone (4.33 km), because NISAR’s 6.26 km estimate pulls it slightly away from truth. But operationally, the fusion provides a cross-validated answer: two independent physics arriving at similar locations builds confidence that neither sensor is producing an artifact.
The key insight is that the bootstrap CEP unlocked meaningful fusion. When the raw scatter CEP (127 km) was used, NISAR dominated the posterior 343:1 and fusion added nothing. With the fit-based CEP (3.48 km), both sensors contribute, and the posterior reflects genuine multi-modal evidence.
Operational implications
For CYGNSS: CYGNSS excels at both detection and localization. Its 785 detections across a 200 km radius, with zero false positives on baseline dates, provide unambiguous jammer detection. The 1/r² fit achieves 4.33 km accuracy with a bootstrap-verified 3.48 km CEP, meaning an analyst can trust the result to single-digit kilometer precision without ground truth. CYGNSS’s eight-satellite constellation also provides sub-daily revisit, enabling near-real-time monitoring.
For NISAR: NISAR provides independent geometric confirmation. With just two passes over an active jammer, the bearing intersection achieved 6.26 km accuracy with a 6.88 km CEP. The 6.26 km result is constrained by orbit geometry, not by detection sensitivity. Our two ascending passes from Track 157 produced nearly parallel range arcs with only 8.1° of bearing separation. Adding a single descending pass would provide a crossing angle of 60° to 70° and could reduce localization error to sub-2 km — transforming NISAR from a confirming sensor into a precision localization tool in its own right. The limitation in this study was data availability: The NISAR beta archive contained only ascending Track 157 passes over the jammer site. NISAR’s 12-day repeat cycle and fixed ground track also mean the jammer must be active when the satellite passes overhead. NISAR’s current value is as a confirming sensor — when both modalities converge on the same location, confidence increases beyond what either achieves alone.
For Fusion: With comparable CEPs (3.48 km vs 6.88 km), fusion now produces genuinely blended estimates. The Bayesian posterior at 4.69 km reflects real multi-sensor information. Future improvements, such as more NISAR passes with diverse bearings or CYGNSS multi-week accumulation, would tighten both estimates further.
For the Adversary: These results demonstrate that GPS jammers operating in contested airspace are observable and localizable from orbit using openly available civilian satellite data. The 4.33 km CYGNSS result is approximately 2× better than the published state of the art for GNSS-R jammer localization (~9 km grid resolution, Chew et al., 2023) and the NISAR bearing intersection approach has not been previously demonstrated for jammer geolocation.
Still broadcasting: Jammer persistence through conflict
The validation analysis used January 2026 data. But on Feb. 28, armed conflict erupted in the region. Did the jammer survive?
We ran the CYGNSS noise floor detection pipeline for each day from Feb. 28 through April 6, comparing against the December 2025 baseline. The answer is unambiguous: The jammer is not only still active — it is operating at dramatically higher power.
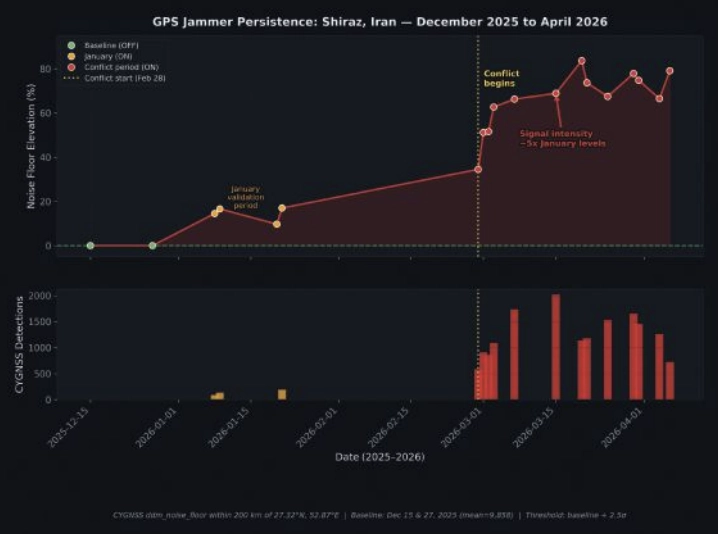
FIGURE 6 A timeline of jammer activity for Shiraz, Iran, from December 2025 to April 2026.
In January, the jammer elevated the CYGNSS noise floor by approximately 15% above baseline. By early March, days after the conflict began, noise elevation had jumped to 50% to 60%. By mid-March, it reached 70% to 84%, where it remained through early April. Detection counts tell the same story: 89 to 192 per day in January, rising to 1,000 to 2,000 per day during the conflict (FIGURE 6).
The escalation was immediate. On Feb. 28, noise elevation was +34.5%, already double the January level. By March 3, it had reached +62.7%, and by April 6, it peaked at +79.1%. The signal has remained at 5× the January intensity through the most recent available data (April 6, 2026).
Several interpretations are consistent with this pattern:
■ Power increase: The operator increased jammer output power, perhaps in response to the conflict or as a defensive posture against GPS-guided munitions.
■ Additional jammers: Multiple units may have been co-located or deployed nearby, creating an aggregate signature larger than any single device.
■ Duty cycle change: The jammer may have shifted from intermittent to continuous operation.
What is clear is that the jammer we localized in January was not incapacitated by the conflict. It was amplified. CYGNSS’s sub-daily revisit capability makes this kind of persistent monitoring possible using entirely passive, civilian satellite data — no tasking, no cooperation with the target state and no risk to reconnaissance assets.
Context and prior work
CYGNSS-based RFI detection builds on work by Chew et al., 2023, who demonstrated grid-level jammer detection at approximately 9 km resolution using DDM noise floor anomalies. Our 1/r² parametric fit extends this from detection to localization, achieving sub-5 km accuracy by exploiting the physics of signal power decay.
At the other end of the precision spectrum, Murrian et al., 2021, demonstrated ~220 m jammer localization using ISS-mounted Doppler measurements of raw intermediate-frequency (IF) data. This approach achieves an order of magnitude better precision than our methods but requires specialized hardware and raw signal access not available on current operational satellites.
The NISAR bearing intersection approach demonstrated here is, to our knowledge, the first published use of L-band SAR RFI streaks for jammer triangulation. The key insight is that NISAR’s proximity to GPS L2 (just 30 MHz separation) makes it an unintentional but effective GPS interference sensor.
Summary
Two satellites, two physics, one jammer. CYGNSS sees the interference footprint across hundreds of kilometers and localizes the source through inverse-distance physics. NISAR sees the emissions directly in its SAR receiver and triangulates through bearing intersection. Both achieve sub-7 km accuracy independently; together, they cross-validate and build the confidence that operational use demands.
The jammer near Shiraz is still there — louder than ever. The satellites are still watching.
Chew, C., Shah, R., Zuffada, C., et al. (2023). “Demonstrating CYGNSS as a Tool for Detecting GNSS Interference on a Global Scale.” IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing.
Murrian, M.J., Narula, L., Iannucci, P.A., et al. (2021). “GNSS Interference Monitoring from Low Earth Orbit.” Navigation: Journal of the Institute of Navigation, 68(1).
NASA JPL. (2024). “NISAR L-band SAR Technical Specifications.” NASA/ ISRO SAR Mission Documentation. Closas, P., Fernández-Prades, C. (2023). “GNSS Interference Detection and Mitigation: A Survey.” Signal Processing, 206.
Research drawing on data from Spire Global’s GNSS-R constellation has enabled the generation of Arctic-wide sea ice maps, marking a major step forward for GNSS-R. The research, enabled by the European Space Agency — suggests harnessing GNSS-R signals could become an important complement to established ice-monitoring altimetry missions. The study leveraged Spire’s GNSS-R data to retrieve sea ice freeboard measurements across an entire winter season. The results show strong alignment with established altimetry datasets, including the ESA’s CryoSat mission.
Russian jamming goes to the dogs
Credit: Marit Leinan Abrahamsen/Finnmarksløpet
Military jamming and spoofing from Russia’s Kola Peninsula interfered with GNSS trackers on dog sleds in Europe’s longest sled race, the 1,200- km Finnmarksløpet, held in Norway in March. The electronic warfare degraded GPS signals, forcing the mushers to rely more on trail markings and use traditional compasses and maps. Event organizers, who provided a live tracking system for fans, found it difficult to follow along, but the racers finished without incident.
Michigan Technological University is examining 11,000 historical images of the state’s Upper Peninsula to find precisely where each photographer stood to take the photo. According to university GIS data librarian Bob Cowling, the location will provide richer information about a place’s surroundings, especially if structures or environmental landmarks are no longer present. Donated historical images often arrive without any dates or location information attached to them. The project will make them easier to find on a map and make it possible to visualize what was there in the past.
In February 2023, a devastating 7.8-magnitude earthquake struck near the Türkiye-Syria border, followed by a second nearly as strong. Six Turkish universities have launched TR-TRAK-GNSS, a real-time geodetic monitoring network to trace earthquake-related ground deformation across Thrace and the Southern Marmara region. The 28-station system is expected to evolve into a major scientific and early warning system for earthquakes. Once fully deployed, it will form a continuous monitoring ring encircling Thrace and Southern Marmara.
FastXY can transform standard mobile devices into professional-grade data collection tools for geospatial information systems (GIS) and architecture, engineering and construction (AEC) professionals. FastXY offers professionals the ability to collect point, line and polygon data, and delivers advanced capabilities including 3D basemaps, construction staking, topographic surveying, on-the-fly datum transformations and survey-grade elevations. A built-in Bluetooth data parser allows users to configure the app to collect data from virtually any instrument supporting BLE Bluetooth or RS-232 — including echosounders, radiation sensors, laser rangefinders, barcode scanners and more — and marry that data instantly with precise GNSS coordinates. Available in free and premium versions.
Handheld scanner: Designed for BIM, indoor scanning and reality capture
The RS7 handheld SLAM (simultaneous localization and mapping) scanning solution was built for BIM documentation, indoor surveying, renovation planning and complex spatial analysis. It is designed to help professionals capture high-density 3D data efficiently and convert it into practical deliverables through CHCNAV’s software and cloud ecosystem. The RS7 integrates a next-generation lidar scanner capable of measuring up to 1.15 million points per second. Its wide field of view (360° x 189°) supports comprehensive coverage of floors, walls and ceilings, helping reduce the need for repeated passes and complex capture maneuvers in tight or cluttered spaces. The scanner also includes a high-precision inertial measurement unit with bias stability better than 0.5°/h. By combining lidar and inertial data, the system is designed to maintain stable motion estimation and consistent point-cloud quality in environments that challenge many mobile workflows, including long corridors, repetitive structures, and feature-limited interiors.
Mobile scanner: All-in-one system offers SLAM, LIDAR, RTK and 360 degree imagery
The GX1 is an integrated, highly accurate all-in-one mobile scanning system combining simultaneous localization and mapping (SLAM), lidar, real-time kinematic (RTK) georeferencing, cameras and software. It supports a seamless workflow, from capture to deliverable, and can reduce the time required to survey a site by up to 95%. The independently validated global accuracy of 5 mm to 10 mm delivers the precision needed for topographic and road surveying, scan to building information models, construction progress tracking, and more. These capabilities are supported by integrated RTK georeferencing with real-time quality monitoring, four 20MP cameras for 360° panoramic imagery, and a proven SLAM algorithm. The GX1 has four deployment modes — backpack, survey pole, vehicle mount and supported handheld.
Quad-band GNSS rover: With support for Galileo high accuracy service
The SparkPNT TX2 quad-band GNSS rover combines an IP67-rated aluminum enclosure with support for Galileo’s High Accuracy Service (HAS) and standard RTK correction workflows. The receiver is built around the Quectel LG290P quad-band GNSS engine and supports multi-constellation tracking. Galileo HAS support provides sub-20 cm accuracy globally without subscription-based correction services, while RTK workflows via NTRIP or u-blox PointPerfect can achieve centimeter-level positioning. Battery life is rated at 50-plus hours, positioning the TX2 for multi-day field campaigns without recharging. The unit connects to iOS and Android devices via Bluetooth and WiFi, with compatibility reported for common GIS and data-collection applications. A notable design choice is the open-source firmware, which gives users visibility into how positioning data is processed and allows for customization and third-party integration. SparkFun has positioned this as an alternative to closed GNSS ecosystems where firmware and processing pipelines are not user-accessible.
Mobile
GNSS platform: Provides ultra-low power GNSS for all environments
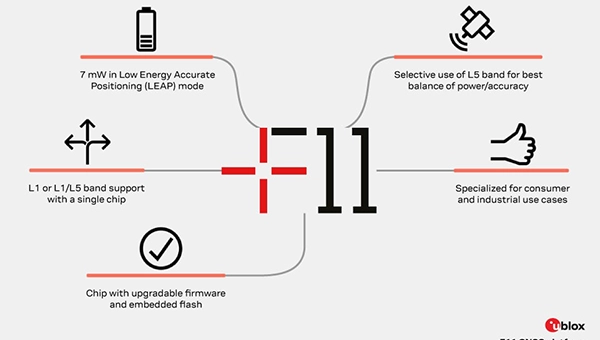
The u-blox F11 platform provides L1/L5 dual-band standardprecision GNSS to improve positioning accuracy while reducing power consumption to as low as 7 mW in typical configurations. It combines ultra-low power operation with intelligent signal management to meet the evolving demands of tracking, wearables, telematics and mobility applications — including micromobility solutions and drones. The platform enables device manufacturers to achieve longer battery life, faster and more reliable position fixes, and greater design flexibility. Its situationally aware GNSS architecture, with integrated geofencing and indoor detections, dynamically balance accuracy and power consumption. By selectively using dual band L1/L5 operation only when it helps maintain positioning performance, the platform reduces energy use while providing resilience and maintaining confidence in location data.
The Iridium 9604 is a compact, threein-one internet of things (IoT) module that integrates Iridium short burst data satellite service, LTE-M cellular connectivity, and GNSS positioning into a single platform. The Iridium 9604 seeks to make dual-mode IoT connectivity viable for price-sensitive, high-volume deployments. Built on the u blox SARA-R5 platform, the module comes in a compact 16 mm x 26 mm x 2.4 mm form factor, suitable for dual-mode IoT deployments across industrial, infrastructure and mobility applications.
L1+L5 GNSS modules: For trackers and high-precision IOT
Two dual-band positioning modules built on Airoha’s AG3335 chipset series are available: the ultracompact SE873K5-D and the high-end SE869eK5-DRK. Both support space- and power-constrained IOT devices and use cases that require continuous, ultraprecise positioning. The modules provide a scalable path to adopt dual-band L1 + L5 GNSS.
Timing
Cesium-less clock: An alternative to cesium-accuracy holdover clocks
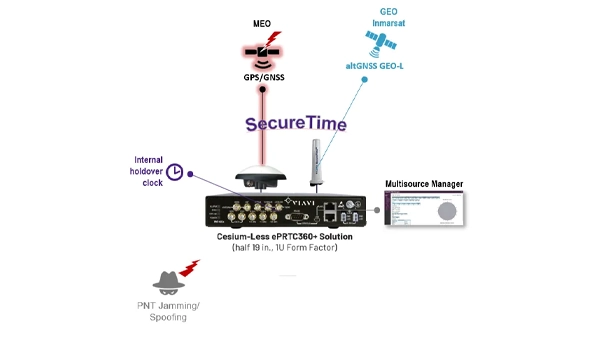
The patent-pending Cesium-less ePRTC360+ holdover solution is designed to safeguard atrisk infrastructure against the increased threat of GNSS timing disruptions. It is the only alternative to Cesium clocks to meet ITU-T G.8272.1 standards. It can protect critical power grids; transportation, aviation and public safety systems; 5G mobile networks; and AI data centers. It meets the international ITU-T G.8272.1 standard and has been successfully tested across a range of livesky defense and commercial jamming/spoofing environments. It has been integrated into VIAVI’s SecurePNT 6200 product series and can maintain 100 ns accuracy during GNSS-denied threats through the resilient altGNSS GEO-L service with no time limit.
The U4930 series is a reliable and cost-effective six-axis microelectromechanical system (MEMS) and inertial measurement unit (IMU) module for navigation, control and measurement of vehicles, ships and drones. Applications include vehicle/ship attitude measurement, UAV attitude reference and trajectory control, mobile mapping, track inspection and underwater highprecision navigation. The U4930 series integrates high-performance MEMS gyroscopes and accelerometers within an independent structure. The three-axis MEMS gyroscopes sense the angular motion of the carrier, and the three-axis MEMS accelerometers sense the linear acceleration of the carrier. The system internally performs compensation for zero bias, scale factor, non-orthogonal error and acceleration-related terms across all temperature parameters, maintaining high measurement accuracy over a long period of time. The module supports custom communication protocols and provides synchronization for GPS/GNSS time data and pulse per second (PPS) signals.
Underground navigation: For navigating mines and unmapped environments
Chimera Land is a 3D laser velocity sensor (LVS) designed to solve the primary challenge for underground mining: maintaining precise vehicle positioning in deep, dark and unmapped environments where GPS cannot reach. When fused with an Advanced Navigation inertial navigation system (INS), Chimera Land allows underground vehicles to maintain stable navigation over extended distances and time. Instead of needing to query an external beacon or satellite for its location, the sensor uses specialized lasers to measure a vehicle’s ground-relative 3D velocity with high accuracy. By feeding this precise data into the vehicle’s INS, the sensor eliminates the drift that typically comes with standalone INS. Using AdNav Intelligence, the result is a resilient, high-performance, infrastructure-light positioning solution that excels in the highdust, zero-light conditions typical of underground mines.
Simulators
GNSS test tool: Provides real-world testing with signals from the field
The SimXTRACT GNSS test tool bridges the gap between field and laboratory. It enables signals captured in field environments to be comprehensively decomposed into individual, discrete signals and applied to lab simulation for realism at every stage of the development test cycle. Developers usually rely on either RF record-and-playback or lab simulation for testing and validation of PNT systems and devices. SimXTRACT takes real signals captured in field environments and performs complex signal decomposition, breaking down each received signal into discrete line-of-sight and multipath ray paths, along with metadata such as Doppler offset, code error, power level and angle of arrival. This decomposed environment is then automatically converted into fully controllable simulation scenarios for Spirent GNSS simulators.
Autonomous
Inertial measurement unit: For unmanned air, land and sea
Honeywell launched the HGuide i700, an inertial measurement unit (IMU) that delivers high-accuracy performance for unmanned air, land and sea vehicles. By pairing near navigation-grade capability with a nolicense-required (NLR) classification, the HGuide i700 provides integrators worldwide with a new option for critical sensing and navigation. The HGuide i700 uses high reliability sensors and electronic architecture found in Honeywell’s HG3900 inertial measurement unit (IMU). Compact and low power, the HGuide i700 delivers near-navigationgrade accuracy and reliability while being optimized to support longer range navigation in GNSS-denied environments. The HGuide i700 offers strong GNSS-denied performance for by limiting maximum acceleration and spin rates in a license-free package. The latest in Honeywell’s HGuide suite of no-license inertial solutions, the HGuide i700 allows customers to streamline development cycles, simplify system architecture and transition to field deployment quickly. The HGuide i700’s rugged design, compact size and low-power profile make it suitable for diverse commercial, industrial and defense applications, including autonomous vehicles, mapping and surveying.
Anti-jam antenna system: Provides multi-constellation, multi-frequency GNSS signal protection
The GAJT-AE3 protects all major GNSS constellations from jamming with full multiconstellation, multi-frequency coverage, ensuring reliable PNT in demanding airborne environments. Its antenna electronics mitigate interference by creating up to seven nulls per band in the direction of jammers, providing significant anti-jam protection even in dynamic multi-jammer scenarios. The output is a protected radio frequency signal, free from jamming and suitable for input to modern and legacy GNSS receivers. The GAJT-AE3 protects and supports all GNSS frequencies, including L-band corrections and Iridium PNT.
OEM
GNSS board: All-band multifrequency reception and HAS-ready
Syslogic’s new all-band GNSS expansion board for rugged embedded computers is powered by the u-blox X20 receiver. It supports all major GNSS constellations and frequencies, including L1, L2, L5, L6 and L-band, and enables the use of the Galileo High Accuracy Service (HAS). It provides centimeter-level positioning, opening up new applications across industries such as autonomous field management, operation of construction machinery in remote areas, or navigation of automated guided vehicles and autonomous mobile robots. The GNSS board is designed for worldwide use. The integrated u-blox receiver supports modern correction techniques such as RTK, PPP-RTK and PPP. For the first time, it has been fully optimized for PointPerfect Global, u-blox’s proprietary high-precision GNSS correction service, delivering centimeter-level positioning anywhere in the world. This is particularly useful in remote areas without cellular coverage.
GNSS L1/L5 breakout: For meter-level positioning in embedded applications
The SparkFun GNSS L1/L5 Breakout – NEO-F10N (SMA) is a compact GNSS module designed for meter-level positioning accuracy in embedded applications. It uses dual-frequency L1 and L5 bands, with the L5 signal offering improved performance in urban environments due to reduced RF interference within the protected ARNS spectrum.
The board supports concurrent reception of GPS, Galileo and BeiDou, and uses u blox dual-band multipath mitigation to enhance accuracy in challenging conditions. It features a single UART interface, with an onboard CH340 USB-to-serial converter for easy connection to a computer, and standard pin headers for integration with external systems.
The module includes an SMA connector for secure antenna attachment and is configurable using u-blox u-center software.
During a recent infrastructure survey, a handheld scanning system captured a multi-acre property in less than 15 minutes. As the operator moved through the site, the device continuously scanned the environment while maintaining centimeter-level positioning using satellite signals, inertial sensors and lidar.
The result was a fully georeferenced three-dimensional dataset containing terrain, buildings, trees and infrastructure — captured in a fraction of the time required by traditional survey workflows. Technologies such as these illustrate how far positioning systems have evolved. What once required multiple instruments, control networks and extended field observation can now be accomplished through integrated sensing systems combining satellite navigation with reality capture.
Yet, the foundation of these capabilities traces back more than six decades. Today, billions of devices depend on GNSS positioning. Smartphones, vehicles, aircraft, agricultural equipment and industrial systems rely on satellite signals to determine location and synchronize time. Within the geospatial industry, GNSS has evolved beyond navigation. It now serves as the spatial framework anchoring a growing ecosystem of sensors and measurement technologies capable of capturing the physical world in extraordinary detail.
Receiver evolution and productivity
While satellite constellations and positioning algorithms have steadily improved, many of the most noticeable changes for surveyors have occurred in the instruments themselves.
Modern GNSS receivers are smaller and more efficient than earlier generations. Advances in electronics, antenna design, signal processing and battery technology have reduced size and power requirements while improving reliability and usability in the field.
According to Chris Pappas, owner of Green Forest Surveys and a geospatial thought leader, recent GNSS receiver development has focused on usability rather than increases in raw positioning accuracy.
“What I’ve seen lately is smaller receivers, longer battery life and smaller antenna sizes on the heads,” Pappas said. “The quality has basically remained the same.” These improvements may appear incremental, but they have meaningful impacts on field operations.
Survey crews work in demanding environments such as steep terrain, construction sites, transportation corridors and remote infrastructure locations where equipment weight and power management affect productivity.
“It’s portability. It’s fatigue from walking up a hill,” Pappas explained. “And the= longer battery life means you don’t have to constantly swap batteries or carry extras. You can take a single set with you and it’ll last all day.”
Modern receivers also have benefited from advancements in satellite signals and correction services. Today’s survey-grade receivers routinely track multiple frequencies from multiple constellations.
Miniaturization is not simply a reduction in size. Achieving multi-constellation tracking, multi-frequency processing and real-time correction required major advances in RF engineering and integrated circuit design.
Capabilities that once required large, power-intensive hardware platforms are now integrated into compact receivers capable of operating an entire day on a single charge.
Signal modernization, algorithms and the RTK engine
While receiver hardware has become smaller and more power-efficient, some of the most significant advancements in GNSS performance have occurred in the algorithms and processing engines operating inside those devices.
Modern receivers are specialized computing platforms designed to process signals from multiple constellations, frequencies and correction sources simultaneously. Tracking multiple constellations enables receivers to observe dozens of satellites while reducing ionospheric and multipath errors.
The real breakthrough, however, has come from improvements in the RTK engine itself.
RTK positioning relies on resolving the carrier-phase ambiguities — the unknown integer number of wavelengths between the satellite and the receiver. Earlier RTK systems often required extended initialization periods.
Modern receivers use more sophisticated ambiguity resolution algorithms that leverage multi-frequency observations and improved statistical modeling. Initialization times have dropped, and solutions are more robust in difficult environments.
Modern RTK engines incorporate advanced filtering techniques, stochastic modeling and automated outlier detection to maintain stable solutions when individual observations become unreliable.
These improvements are particularly important as surveyors increasingly work in environments where GNSS conditions are less than ideal. Urban infrastructure, tree canopy and industrial facilities can obstruct satellite signals and introduce multipath errors.
Advanced filtering architectures allow receivers to reject corrupted observations while maintaining stable positioning using valid measurements.
Many modern receivers incorporate Kalman filtering frameworks that continuously estimate position, velocity, clock bias and measurement uncertainties.
These filters allow GNSS measurements to be integrated with inertial sensors and motion constraints, creating more stable positioning solutions.
Network-based correction services also have become increasingly common. Rather than relying solely on a nearby base station, many surveyors now use network RTK systems that aggregate observations from multiple reference stations across a region.
These networks model atmospheric errors and deliver corrections through cellular or internet connections.
Precise point positioning (PPP) techniques, which use precise orbit and clock information rather than local base stations, also have matured significantly. Modern PPP engines can now resolve centimeter level positioning in real time or near real time, something that only a few years ago could take up to an hour using satellite based augmentation.
These advances have been enabled by the evolution of GNSS chipsets. Modern receivers integrate RF front ends, signal processors and navigation engines into compact system-on-chip architectures capable of tracking dozens of signals while running complex positioning algorithms in real time.
The result is a positioning engine that is no longer confined to a single receiver mounted on a survey pole, but operates as the central reference system for a network of sensors capturing complex environments.
The maturity of the modern positioning engine
One of the less visible but most important developments in GNSS over the past decade is the maturation of the positioning engine itself. Early GNSS receivers were essentially signal trackers paired with simple navigation algorithms. Today’s receivers function more like specialized computing platforms optimized for real time estimation.
At the core of these systems is an estimation framework that continuously evaluates the quality of each observation entering the solution. Carrier phase measurements provide the highest precision available from GNSS, but are highly sensitive to noise, multipath and signal interruptions.
Modern RTK engines must balance precision with reliability. Rather than assuming every observation is equally valid, processing engines assign dynamic weights based on signal strength, satellite geometry, atmospheric models and measurement stability. These approaches allow receivers to maintain accurate positioning even when portions of the satellite environment become unreliable.
Solar storms, such as this one in North Carolina, produce beautiful auroras. They also cause signal disruption and interference for GNSS systems. Many of the modern RTK engines now have the ability to filter out this interference and maintain a fix.
The introduction of multi frequency signals also has changed how ambiguity resolution is performed. Earlier RTK systems relied on dual-frequency measurements to estimate ionospheric delay and resolve integer ambiguities. With additional frequencies across multiple constellations, modern receivers apply more advanced ambiguity resolution strategies that improve convergence speed. In practical terms, this means surveyors spend less time waiting for initialization and more time collecting data.
Modern receivers also incorporate tightly integrated filtering architectures. Extended Kalman filtering frameworks continuously estimate position, velocity, clock bias, atmospheric parameters and measurement noise. These models treat positioning as a dynamic estimation problem rather than a static calculation performed at each epoch. The result is a positioning engine capable of maintaining stable centimeter level solutions even when signal conditions fluctuate. For surveyors working in environments with partial satellite obstruction, intermittent multipath or complex site conditions, these improvements often determine whether a day in the field is productive or not.
GNSS as foundational infrastructure
Today, GNSS occupies a unique position in the technology landscape. It is both a mature infrastructure system and a platform for continued innovation. The fundamental architecture of satellite navigation has remained largely consistent for decades, while the ecosystem built around those signals has expanded dramatically.
In many ways, GNSS has become invisible because it works so well. Surveyors, engineers and geospatial professionals interact with receivers, correction services and data products rather than with the satellites themselves. Positioning is expected to function, much like electricity or cellular connectivity. But under that routine operation lies one of the most sophisticated global infrastructure systems ever constructed.
At the space segment level, multiple international constellations provide overlapping coverage. The United States’ GPS, Russia’s GLONASS, Europe’s Galileo and China’s BeiDou systems transmit modernized signals designed to improve accuracy, reliability and interoperability. Regional systems such as Japan’s QZSS and India’s NavIC further strengthen coverage.
This multi-constellation environment represents one of the most significant changes in the GNSS landscape throughout the past two decades. Early survey grade receivers relied primarily on GPS signals, while modern receivers track four or more global constellations simultaneously.
The impact extends beyond redundancy. Observing more satellites improves geometric strength and allows receivers to maintain robust solutions in environments where single constellation systems would struggle, including urban corridors, forested areas and complex infrastructure sites.
Signal modernization has expanded the range of measurements available to positioning engines. Additional civilian frequencies such as GPS L5 and Galileo E5 allow better modeling of ionospheric effects and reduced measurement noise, contributing to more stable positioning solutions.
The most important shift, however, is not in the satellites themselves, but in GNSS’s role within the broader measurement ecosystem.
In the surveying and geospatial industries, GNSS has evolved from a standalone measurement technique into the spatial reference framework for modern data capture technologies. It now anchors measurement platforms capable of capturing millions of spatial observations.
In traditional surveying, GNSS remains a primary method for establishing control networks and geodetic reference points, with RTK and post-processed kinematic techniques routinely achieving centimeter-level accuracy.
In construction and machine control, GNSS enables automated positioning systems that guide heavy equipment using digital terrain models in real time.
In agriculture, precision farming systems use satellite positioning to guide equipment along exact paths, reducing fuel consumption and optimizing inputs.
GNSS also functions as the primary time synchronization system for critical infrastructure, including telecommunications, financial systems and power grids.
For geospatial professionals, the most significant change is how GNSS interacts with emerging measurement technologies. Rather than acting as a standalone sensor, it now operates as the global reference frame for integrated systems.
The satellite-derived position establishes a coordinate foundation that other sensors use to build dense spatial models. In a typical workflow, GNSS establishes the reference, inertial sensors track motion, lidar captures geometry and cameras record imagery. All observations rely on the GNSS reference frame to maintain spatial consistency.
This enables a shift from discrete point measurement to continuous data capture. Instead of collecting individual points, modern platforms capture millions of observations that can be analyzed and extracted as needed.
GNSS remains the backbone of this process. Even as new sensors emerge, the requirement for a stable global reference frame has not changed. GNSS provides that anchor.
Sensor fusion and the expanding positioning stack
While GNSS technology continues to evolve, some of the most significant advances in positioning are occurring through integration with other sensing technologies.
Trees, such as this 150-year-old tulip poplar, were killers of previous-generation GNSS systems. Robust designs, the modern sensor stack, and powerful algorithms can now fix reliably in heavy canopy, saving hours of traditional work.
Modern positioning systems operate as part of a broader sensor ecosystem. Satellite observations provide the global reference frame, while inertial measurement units track motion and orientation, lidar sensors capture geometry and visual sensors analyze environmental features.
Hybrid platforms extend GNSS capability into environments where satellite signals alone may struggle. Several manufacturers now offer handheld systems that combine GNSS receivers with lidar scanning and inertial navigation. Systems such as the CHC Navigation VLi100 integrate GNSS, lidar, inertial sensing and visual positioning into a single instrument. The VLi100 also incorporates the SureFix 2.0 engine, which uses lidar to stabilize the GNSS position for up to 60 ft after signal loss, extending positioning capability in obstructed environments.
The Tersus S1 SLAM system similarly combines lidar-based mapping with GNSS positioning to capture dense spatial data in complex environments.
The same principles drive mobile mapping systems designed for infrastructure-scale data capture. Trimble’s MX series, including the MX9 and MX90, combines GNSS positioning, high-accuracy inertial navigation and high-density lidar to capture detailed spatial data while in motion.
“Sensor fusion is probably the biggest one right now,” said Justin Brooks, sales manager for reality capture at Trimble. “When you combine GNSS with lidar and inertial sensors, you’re not just collecting points anymore. You’re capturing entire environments.”
Mobile mapping is increasingly used across the energy sector. According to Jason Rosbach, director, energy solutions at Trimble, large renewable energy projects such as utility scale solar and wind developments require rapid spatial documentation across thousands of acres. These systems allow survey teams to capture dense geospatial datasets while maintaining consistent positioning through tightly integrated GNSS and inertial navigation.
Karl Bradshaw, director, product management, reality capture at Trimble, explained that GNSS remains the core reference.
“In the MX systems, that GNSS position is the initial core point,” Bradshaw said. “Then the IMU interpolates the vehicle path between those GNSS fixes and provides heading, pitch and roll orientation. Every lidar pulse gets geolocated using that combined solution.”
Reality capture and the GNSS positioning pyramid
The convergence of GNSS positioning with lidar scanning, inertial navigation, and SLAM-based mapping is driving the broader adoption of reality capture workflows across the geospatial and infrastructure industries.
At the core of these systems remains a GNSS-centric positioning pyramid. Satellite observations provide the spatial reference that anchors all other measurements. The additional sensors extend and stabilize that position when conditions become challenging.
From point measurement to spatial data acquisition
The integration of GNSS with modern sensing technologies has changed the scale of spatial data collection.
For most of the 20th century, surveying workflows were based on discrete point measurements. Whether using optical instruments, total stations or early GNSS receivers, surveyors collected individual observations that were later combined to construct maps and models.
This approach remains essential for control networks and boundary surveys, but many modern applications now operate at a fundamentally different level of data density.
Lidar scanners, mobile mapping systems and handheld SLAM platforms can collect millions of measurements in minutes. Instead of selecting points, operators move through an environment while continuously capturing geometric observations. These datasets provide a far more detailed representation of the physical world.
GNSS enables this transition by providing a stable global reference frame. Without it, large point clouds and reality capture datasets would exist only as isolated local models. GNSS allows these datasets to align with engineering design files, geographic information system (GIS) databases and previous survey measurements.
This spatial consistency makes reality capture practical for large infrastructure projects. Transportation departments can compare roadway conditions over time, utilities can integrate asset models and construction teams can verify progress against design.
In each of these workflows, GNSS provides the coordinate framework that keeps datasets aligned across time, sensors and project stages.
The shift from point measurement to continuous data acquisition is one of the most significant changes in geospatial practice in decades.
Even within these systems, positioning still begins with satellite signals. GNSS remains the foundation. Lidar captures geometry, inertial sensors measure motion and SLAM algorithms track environmental features, all fused with the GNSS position.
These systems collect dense spatial observations continuously, allowing entire corridors, facilities and infrastructure sites to be captured rapidly. Because these datasets are anchored to GNSS positioning, they maintain consistent spatial reference over time.
Looking ahead
Another development drawing increasing attention across the positioning industry is the emergence of low Earth orbit (LEO) satellite constellations as potential complements to traditional GNSS systems.
Unlike GNSS satellites operating at medium-Earth orbit altitudes of roughly 20,000 kilometers, LEO satellites orbit much closer to Earth. This proximity allows their signals to reach receivers with significantly higher signal strength and faster acquisition times.
Because the satellites move rapidly across the sky, they also provide constantly changing geometry that can improve positioning performance in environments where traditional GNSS signals struggle.
A number of research groups and commercial companies are now exploring how LEO constellations might augment existing GNSS infrastructure. Some approaches rely on signals from existing communications constellations, while others involve dedicated navigation payloads designed specifically for positioning.
For surveyors and geospatial professionals, the potential benefit is improved positioning reliability in environments where GNSS signals are degraded. Urban corridors, industrial sites and areas with heavy canopy often limit satellite visibility and introduce multipath interference that complicates carrier-phase measurements.
Additional signals from LEO satellites could provide stronger observations in these environments while also improving the redundancy of positioning solutions.
The integration of LEO signals would not replace GNSS but rather expand the broader positioning ecosystem that already has begun to emerge through sensor fusion.
Modern positioning systems increasingly combine GNSS, inertial navigation, lidar, camera and SLAMbased mapping into tightly integrated sensor stacks. GNSS provides the global reference frame, while the other sensors extend and stabilize the positioning solution when satellite visibility becomes limited.
If LEO navigation signals become widely available, they will likely become another layer within that stack.
The long-term result could be positioning systems capable of maintaining centimeter-level trajectories across environments that would have been extremely difficult for GNSS-only solutions just a decade ago.
For the geospatial industry, this evolution represents a continuation of a trend that began decades ago: positioning systems becoming more robust, more integrated, and increasingly capable of capturing the physical world in unprecedented detail.
A roundup of recent products in the GNSS and inertial positioning industry from the January-February 2026 issue of GPS World magazine.
Autonomous
1. Delivery Drones
Volatus deploys medical supplies in Canada
Image: Trimble
Volatus Aerospace has integrated the Trimble PX-1 RTX solution into its commercial delivery drone service to achieve accurate and robust positioning and heading. The Trimble module provides Volatus’ clients with a turnkey solution for highly accurate aerial data acquisition and fully remote drone operations in real-world missions, including beyond visual line of sight (BVLOS). The PX-1 RTX uses Trimble’s CenterPoint RTX corrections along with compact, high-performance GNSS-inertial hardware to deliver real-time, centimeter-level positioning and highly precise inertial-derived true heading measurements. This technology reduces operational risks associated with poor sensor performance or magnetic interference by providing enhanced positioning redundancy.
For border protection and long-range surveillance missions
Image: CopterPIX
The ERE95 Mini by CopterPIX operational platform is fully capable of GNSS-denied missions and integrates a long-range, anti-jamming communication system supporting distances of more than 20 km. It has an endurance of 2 hours and can carry up to 5 kg of payload for up to 1 hour. It also has integrated daylight and thermal imaging for advanced surveillance. With a fully foldable frame, the platform collapses into a backpack-sized kit, making it suitable for rapid mobility and field operations. Its modular “puzzle” architecture allows quick adaptation of SDR modules, optical payloads, and navigation solutions, enabling mission-specific configurations. To support rapid field deployment, the ERE95 Mini features a mechanical and electrical quick-connect interface, allowing operators to switch payloads in seconds and maintain continuous operational readiness across all missions.
Integrated into long-endurance unmanned aircraft system
Image: AeroVironment
AeroVironment has integrated its visual navigation system (VNS) kit with the Puma Long Endurance (LE) small unmanned aircraft system, delivering GNSS-denied navigation capability. The VNS kit uses advanced computer vision and onboard processing to deliver precise, GNSS-independent navigation. Using a suite of downward-facing sensors, cameras and onboard computing, the VNS kit performs visual inertial odometry to capture and analyze terrain imagery, estimating true aircraft position in real time. The system fuses continuous visual data from the cameras with motion inputs from onboard inertial sensors to calculate precise position, velocity and orientation — allowing the aircraft to know where it is and where it is going when GNSS is not available. It automatically transitions between GNSS-enabled and GNSS-denied modes with zero pilot input, ensuring uninterrupted mission continuity in contested environments.
Low power, small footprint setup for close-airspace awareness
Photo: MatrixSpace
The Portable 360 Radar is a rugged, easily transportable radar kit that delivers reliable close-airspace awareness with panoramic coverage for rapid-response counter-drone operations, from safeguarding stadiums and large public gatherings to border security and battlespaces. The MatrixSpace platform unifies threat awareness across multiple networked Portable 360 Radar systems and other sensors, without compromising local operation. By combining AI edge processing with MatrixSpace AiCloud Enterprise software, central command centers get an enhanced common operating picture and deep airspace activity analytics to assure public safety.
The SatLab SL8 Laser RTK GNSS receiver combines dual cameras, GNSS, an IMU and visible laser technology to make surveying faster and easier. With non-contact measurement, image-assisted targeting, CAD live-view stakeout, and a built-in LoRa radio. It ensures smooth, reliable work even in complex or GNSS-limited environments. The SL8 achieves 2 cm accuracy within 10 meters and enables efficient data collection across bridges, tunnels, riverbanks, and other sites where traditional GNSS methods are restricted. It features image-assisted targeting through SatSurv software, displaying laser points directly on real-time images for quick and precise aiming. Its automotive-grade IMU requires no manual calibration or initialization and enhances measurement accuracy by up to 40% in GNSS-challenged areas. A built-in multi-protocol LoRa transceiver provides stable transmission beyond 15 km and compatibility with multiple RTK brands. The integrated CAD and visual stakeout functions combine live imagery with CAD data, allowing users to visualize target points on site and increase layout efficiency by up to 50%.
A complete precision mapping solution for the utility and critical infrastructure industries worldwide is the goal of a partnership between ProStar Holdings and Tersus GNSS. The partnership will integrate Tersus’s survey-grade GNSS receivers with ProStar’s PointMan Underground Utility Mapping Software, providing an affordable, field-ready solution. The partnership will use ProStar’s LinQD open API integration platform, which is designed to enable seamless interoperability between emerging technologies and legacy systems, creating a robust global ecosystem for geospatial intelligence, uniting equipment manufacturers and service providers under the initiative.
The MVP S1 RTK-SLAM handheld 3D laser scanner uses GNSS through an AI-driven RTK-SLAM workflow, as well as lidar data with imagery from dual 48-megapixel panoramic cameras. The combination provides survey-grade results in both GNSS-denied and open environments. The system achieves centimeter-level accuracy outdoors and maintains performance indoors or underground through SLAM processing. TimeSync 3.0 synchronizes the hardware, aligning sensor data at the microsecond level and supporting consistent datasets and reliable post-processing. A mobile application provides users with real-time feedback, including previews of colorized point clouds while scanning, as well as basic scan reports on site. This feature helps operators verify data completeness and quality before leaving the field, reducing the need for repeat visits. The MVP S1 supports 3D gaussian splatting (3DGS), enabling creation of textured, photorealistic 3D models. This capability is useful for building information modeling, construction progress monitoring, underground surveys, forestry analysis and industrial site documentation.
The MALÅ GeoDrone 600 and Zond Aero 600 NG are two new high-resolution ground-penetrating radar (GPR) systems for UAVs. They significantly enhance high-resolution subsurface investigations with drones, supporting applications in engineering surveys, utility mapping, archaeology, environmental studies and geophysical research. They enable surveyors to capture consistent, high-quality subsurface data in areas difficult, slow or unsafe to access with traditional ground instruments. Operating at 600 MHz, the antennas offer a balance between penetration depth and fine near-surface resolution. Typical penetration from the drone is up to 2 meters, depending on surface conditions, while SPH Engineering’s True Terrain Following ensures stable antenna height to maintain data quality and repeatability.
For high-precision surveying, photo surveys and 3D modeling
Image: Aurora Navigation
The Astra1 Mobile Visual RTK is a professional-grade GNSS receiver engineered to redefine high-precision mobile data acquisition. It is built to meet the demand for highly portable, reliable, high-precision tools that simplify complex field operations. At 60 grams, the Astra1 is an ultra-compact solution designed to deliver reliable, centimeter-level positioning and advanced 3D mapping capabilities through seamless integration with a smartphone and the proprietary Anypos App. Accuracy is RTK 8mm+1PPM horizontally, 15mm+1PPM vertically, photo survey <4 cm (2-15 m distance). The Astra1 allows users to capture photos with precise RTK coordinates, enabling the creation of accurate 3D models for detailed construction verification and digital twinning applications.
The AR588MA is a 5G-advanced (5G-A) automotive-grade cellular module that integrates dual-band GNSS supporting both L1 and L5 bands with up to 30 Hz output. Based on MediaTek’s latest-generation MT2739 platform, the AR588MA supports 5G-A communication technology and complies with the 3GPP R18 standard protocol. It features both NB-NTN and NR-NTN satellite communication capabilities and supports dual-SIM dual-active (DSDA) technology, offering improved stability and reliability on cellular connections. It also includes intelligent driving scenario recognition. Designed in compliance with the AEC-Q104 Grade 2 automotive standard, it delivers fast, stable connectivity and reliable security for in-vehicle communication and benefits on-roof applications, such as smart antennas for automotive, with higher-temperature support.
A firmware upgrade to the Xsens Sirius and Xsens Avior IMUs delivers centimeter-level vertical displacement measurements for marine stabilization and control systems. The new Heave feature enables real-time stabilization and wave compensation in a wide range of marine applications. Marine engineers can access comprehensive motion data — roll, pitch, yaw and heave — from a single compact sensor, eliminating the need for external processing or oversized tactical-grade systems while maintaining the precision required for offshore platforms, vessels, docking systems, marine robots, buoys and surveying equipment.
The InnovizThree is fully colored long-range lidar with camera that creates a compact sensor-fusion module designed to reduce OEM integration complexity. The solution combines lidar and RGB sensing in a single compact perception module, purpose-built for behind-the-windshield installations, drones, micro-robotics and humanoids. The consolidation of an RGB camera inside InnovizThree reinforces Innoviz’s commitment to scalable, OEM-friendly sensor-fusion perception solutions designed for series production and long-term deployment, with the potential to enable faster deployment and cost savings. The RGB sensing capabilities are factory-aligned with the lidar, enabling precise and consistent visual-to-lidar geometry across production units. This alignment, combined with hardware-synchronized capture, will enable reliable multi-modal sensor-fusion data correlation while reducing calibration effort during vehicle integration.
High-integrity GNSS integration for autonomous driving
Image: Getty Images / iStock / FlashMovie
Swift Navigation is collaborating with Nvidia to enable a scalable, cost-effective approach to autonomous driving by integrating the Nvidia Drive AGX platform with Swift’s globally referenced, centimeter-accurate GNSS positioning. Swift Navigation offloads absolute localization to the GNSS sensor stack using its Swift Automotive Suite. The suite is a complete, modular software solution for safe, high-integrity precise vehicle localization that combines the centimeter-level Skylark Precise Positioning Service with the Starling positioning engine, software that fuses raw GNSS data and corrections with IMU and wheel odometry to deliver high-integrity, centimeter-accurate positioning (PVT). By using Swift’s high-precision stack for lane-level positioning, the vehicle’s optical sensors focus on obstacle detection and safety, lowering system cost and complexity.
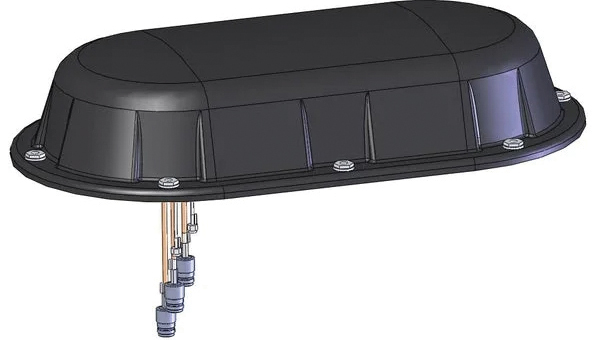
Sinclair’s new SM 5G Family Tier features the SM714 and SM2601 series antennas. The multi-band, multi-port antennas are engineered to deliver superior connectivity, reliability and versatility for GNSS and other mission-critical wireless transportation applications. The SM714 is a 4-in-1 low-profile customizable transit antenna that combines 5G/LTE, Wi-Fi and tri-band GNSS coverage in a single compact form. Supporting 617–5925 MHz, it enables seamless operation across all major 5G and LTE bands. It is suitable for vehicles, fleet systems and connected mobility applications requiring a discreet, high-performance solution. The SM2601D is a 5-in-1 low-profile customizable antenna that features five independent ports: one for PTC (219–223 MHz), one for Wi-Fi (2400–6000 MHz), one for GNSS, and two full-band cellular ports (694–2700 MHz) that support diversity and MIMO operation for multi-radio systems. This dual-cell configuration offers greater throughput, flexibility, and redundancy in complex communication environments.
High-precision depth sensing and real-time velocity measurement
Image: Voyant Photonics
New versions of the Carbon lidar platform add 32-line and 64-line variants for compact, cost-sensitive and compute-limited systems. The new models complement existing 128-line configurations and are optimized for industrial autonomy, robotics, drones and smart infrastructure applications. They offer lower data rates and simplified integration while maintaining core FMCW advantages including velocity measurement, interference immunity and high dynamic range. With line resolutions spanning 32, 64 and 128, original equipment manufacturers and system integrators can tailor performance, bandwidth and compute load to specific use cases, from robotics and automated guided vehicles to drones and embedded edge platforms. The Carbon family’s silicon-photonics architecture integrates beam steering and coherent detection on a single photonic chip. The new variants include high-precision depth sensing and real-time velocity measurement, exceptional ambient light immunity and compact design for industrial and mobile environments.
For automotive track and varied environment testing
Image: VBOX
The NTRIP Base Station from VBOX Automotive combines a multi-constellation, multi-frequency GNSS engine with a built-in networked transport of RTCM via internet protocol (NTRIP) server. The equipment transmits real-time kinematic corrections over radio and cellular or Wi-Fi networks, supporting accurate real-time positioning across wider areas in varied environments compared to traditional radio-only systems. The base station launches in three models, with specifications designed to fit users’ needs. All systems combine quad-constellation, dual-frequency GNSS technology with built-in cellular and Wi-Fi connectivity. Compatible with VBOX 4, VBOX 3iS and external GNSS rovers, the new NTRIP Base Station supports both MSM4 and MSM7 RTCM formats, has up to 24 hours of battery life and is rated to IP67 to handle the demands of long outdoor test sessions. Models include Internal GNSS antenna and 2.4 GHz radio (quick to deploy for short-range applications, for temporary or mobile testing); Internal GNSS antenna, no radio (compact and simple, suitable for NTRIP or semi-permanent installations with external high-power radio masts); and External GNSS antenna, no radio (optimized for permanent installations with tripod-mounted antennas for maximum satellite visibility, supporting NTRIP or external radio).
Several interesting things, according to geologists who study data from the global network of geodetic-quality receivers. A team at the University of the Basque Country found the Iberian Peninsula rotating clockwise as Africa closes on Eurasia by 0.2 inches per year (5 mm), near Gibraltar and the Alboran region. Meanwhile, in a process called lithospheric dripping, Earth’s crust is sinking under Central Turkey despite being part of a broader region that has been uplifting for millions of years, according to University of Toronto researchers. Meanwhile, in the U.S. Pacific Northwest, seismic data collected during a National Science Foundation study shows the Cascadia subduction zone actively breaking apart.
Making better robots with GNSS
Image: Robosat Project
Autonomous robot navigation in the wild using satellite-based 3D geographical information (Robosat) aims to provide a scalable multi-GIS high-quality data collection platform through using a quadrupedal robot that can autonomously perform long-distance missions in challenging environments, such as the Alps or Finnish forests. Researchers from Finland, Switzerland, Spain and Romania gathered at Tampere University in Finland to share data, identify relevant GIS and GNSS datasets, and leverage AI for autonomous labeling of large-scale data. Key topics included integrating multi-sensor and multi-GIS data to enhance positioning, planning pilot tests with ETH’s ANYmal robot (pictured) and TAU’s new I/Q GNSS grabber device, and discussing methods for AI-driven data labeling for massive datasets collected in field trials.
It’s all happening downtown
Image: Getty Images / Ivan Pantic
Researchers from Shandong Jianzhu University and the China University of Mining and Technology describe a new smartphone positioning strategy in the Dec. 15, 2025, issue of Satellite Navigation. They use a positioning framework that combines 3D map constraints with multiple GNSS observations. By integrating time-differenced carrier-phase information with probabilistic road matching and factor graph optimization, the approach reduces ambiguity in candidate positions and enhances robustness against non-line-of-sight signals. In field tests, the method outperformed existing smartphone GNSS techniques, delivering more reliable location estimates and smoother trajectories even in severe urban canyon conditions.
2,000 and counting
Image: Getty Images / rvimages
The International Air Transport Association (IATA) has called for vigilance following the increasing number of GNSS spoofing and jamming incidents worldwide. The growing interference poses a significant risk to flight navigation and pilot safety. Of note is a spike in incidents at major Indian airports. Almost 2,000 GNSS interference incidents have been logged at airports in India since 2023, including the airports in Delhi, Mumbai, Kolkata, Amritsar, Hyderabad, Bengaluru and Chennai. IATA represents more than 360 airlines, accounting for 80% of global air traffic.
Ionospheric delay remains a significant error source in GNSS positioning, particularly for single-frequency users and during periods of enhanced space weather activity (Dabbakuti, 2021). While global and regional ionospheric models provide large-scale corrections, they often fail to represent localized ionospheric variability at individual receiver locations (Jee et al., 2010; Osanyin et al, 2025).
Consequently, residual ionospheric errors persist in positioning solutions, degrading accuracy for applications including precise point positioning (PPP), real-time navigation, and single-frequency GPS users (Biswas et al., 2022). Hence, accurate modeling of the ionosphere is essential in tackling the principal challenges in high-precision GNSS positioning.
Vertical total electron content (VTEC), a key driver of ionospheric delay, exhibits strong nonlinear temporal variability controlled by solar radiation, geomagnetic activity, seasonal effects, and local electrodynamics (Osanyin et al., 2023; Seemala et al., 2023). Capturing this variability at individual GNSS stations poses a significant challenge. Advances in artificial intelligence (AI), i.e., machine learning (ML) techniques have emerged over the decades as powerful tools for approximating complex non-linear systems and deterministic geophysical processes, while significantly reducing computational cost (Sarker, 2021). As such, they have successfully replaced repeated full-scale numerical simulations by learning input-output relationships directly from data (Zhang et al., 2025). This paradigm shift is particularly relevant for ionospheric modeling, where long-term GNSS observations provide rich time series well suited for data-driven learning.
Time series forecasting traditionally relies on statistical models such as autoregressive (AR), moving average (MA), autoregressive moving average (ARMA), and autoregressive integrated moving average (ARIMA), which model future values as linear functions of past observations (Kaselimi et al., 2020). They have been widely employed to predict VTEC by extrapolating historical observations. Nonetheless, the classical approaches are inherently limited by assumptions of linearity, stationarity and short-term memory, which restrict their ability to capture complex ionospheric dynamics, particularly during disturbed conditions and over longer prediction horizons. To address these limitations, this study adopts a deep learning-based framework using long short-term memory (LSTM) neural networks for station -pecific VTEC prediction. Unlike conventional statistical models, LSTM networks are specifically designed to learn non-linear temporal relationships and retain long-term memory in sequential data (Hochreiter and Schmidhuber, 1997).
Essentials
LSTM neural networks for prediction have emerged as a powerful tool for time-series prediction (Hochreiter and Schmidhuber, 1997). LSTM is a type of recurrent neural networks (RNNs) that takes sequences of information and uses recurrent mechanisms and gate techniques (see Figure 1). RNNs are well known for their ability to process single data points and entire data sequences (Gonzalez and Yu, 2018). The LSTM model has various forms for different types of data inputs. The basic condition of LSTM modeling is that all inputs and outputs are independent of each other. The key to the LSTMs is the cell state, which is protected and controlled by the forget, input and output gates, respectively (Gonzalez and Yu, 2018).
FIGURE 1 Comparison of recurrent neural network (RNN) and long short-term memory (LSTM) structures.
Training deep learning modelsremains computationally demanding despite their fast prediction capability. LSTM networks consist of interconnected layers with numerous trainable parameters that must be optimized iteratively to accurately capture temporal dependencies in the data. Training typically involves large historical datasets spanning multiple years, which is necessary to expose the model to varying ionospheric conditions, but also increases computational effort (Thompson et al., 2020). The optimization process relies on iterative algorithms such as stochastic gradient descent and variants, requiring repeated forward and backward passes through the network. As the depth of the model and the length of input sequences increase, so does the demand for memory and processing power. These challenges are particularly relevant when training is performed using graphics processing units (GPUs), where memory limitations and data transfer overhead must be carefully managed (Sarker, 2021).
Like all neural networks, LSTM has trainable parameters (weights and biases). These parameters are optimized by minimizing a loss function using gradient-based optimization. Due to its ability to learn time sequences, gradients must be propagated across time steps, not only across layers. This process is accomplished using backpropagation through time, which computes gradients of the loss with respect to all parameters and accumulates gradients across the sequence. The major advantage of LSTM is the use of its gating mechanism in mitigating vanishing gradients, making backpropagation practical for long time series such as VTEC (Adekunle et al., 2025; Hochreiter and Schmidhuber, 1997; Noor and Ige, 2025).
In recent years, LSTM networks have achieved impressive results in modeling complex physical systems characterized by strong non-linearity and long-term temporal dependencies. Notably, LSTM-based approaches have been successfully applied to atmospheric and geophysical time series, demonstrating superiority in predictive skill compared to traditional empirical and statistical models (see Reddybattula et al. (2022 and references therein). These research results show the capability of LSTM to capture diurnal, seasonal, and storm-time variations. By leveraging historical GNSS-derived VTEC time series, LSTM-based models can adaptively capture both regular ionospheric patterns and transient disturbances, enabling more accurate and robust VTEC forecasts. This data-driven approach directly supports improved ionospheric correction in GNSS positioning, offering a practical and scalable solution to overcome the shortcomings of traditional time series methods.
This study focuses a station-specific vertical total electron content (VTEC) prediction framework based on long short-term time series. The proposed framework treats VTEC prediction as a supervised regression problem. A sequence of past VTEC observations is used to predict future values over one or multiple forecast horizons. Also, emphasis is placed on methodology clarity, practical implementation, and positioning relevance.
Elements: TEC estimation from GNSS measurements
For the purpose of forecasting local VTEC using time series analysis, this study utilized the GPS dataset provided by the Brazilian Institute for Geography and Statistics (RBGE; www.ibge.gov.br/en/) over Santa Maria (SMAR; -20.72o, 306.28o), a station located in Brazil over the period of 10 years from January 2010 to December 2019.
VTEC data were derived from dual-frequency GPS observations at the selected station using the standard ionospheric processing techniques, including slant TEC estimation, instrumental bias correction, and mapping to vertical TEC. For more details, readers can consult the GPS-TEC analysis software developed by Seemala and Valladares (2011), which has been employed in this study for TEC processing. The time resolution is selected to be 15 minutes following an average over a sampling interval of 30 seconds. The resulting VTEC time series provides a continuous record of ionospheric variability with a fixed temporal resolution.
Station-specific LSTM modeling framework
A structured deep learning workflow for station-specific VTEC prediction has been adopted using the LSTM framework. The overall methodology follows a sequential pipeline consisting of data collection, preprocessing, feature engineering, model training, evaluation, validation, and deployment. This workflow ensures reproducibility, minimizes information leakage, and facilitates integration into GPS positioning engines. The focus is on time series learning at a single station, where temporal dependencies dominate and spatial smoothing from regional or global models is undesirable.
Data preparation and model training
High-quality input data are essential for stable LSTM training. The extracted VTEC time series are preprocessed to remove cycle slips, mitigate differential code biases, and ensure consistent temporal sampling. As shown in Figure 2, for this model (as variations can be considered), the dataset has been divided into training (80%), validation (10%), and testing (10%). The validation is mostly required during training the LSTM deep learning model to ensure generalization and prevent overfitting. Furthermore, preprocessing aims at ensuring capability of the model in handling missing data and temporal consistency checks.
FIGURE 2 Chronological splitting of VTEC dataset for machine learning.
Feature engineering mainly converts raw VTEC observations into structured model inputs such as local time (LT) and day-of-year (DOY) features. These features are normalized prior to training, although normalization is applicable to only the training dataset to avoid future leakage. The model consists of an input layer whose dimension equals the number of input features, followed by a single LSTM layer with 64 memory cells to learn temporal dependencies in the input sequence. A dropout layer with a rate of 0.2 is applied to mitigate overfitting during training. The LSTM representation is then passed to a fully connected (Dense) regression head with nout neurons, where nout equals the number of forecast lead times. Model training minimizes the Huber loss function using gradient-based optimization, while performance is evaluated using RMSE. The optimizer updates the network weights iteratively to reduce the forecast error across the training samples. Early stopping and regularization are applied to further prevent overfitting, particularly during periods of low ionospheric variability. The final outputs are the predicted VTEC at multiple lead times (in this experiment: 30, 60, 120 and 180 minutes). The trained model is suitable for deployment in near real-time ionospheric correction systems: once operational, it ingests the most recent VTEC observations and produces short-term forecasts that can be integrated into GNSS positioning workflows, particularly for single-frequency applications and PPP.
Performance evaluation and baseline comparison
For practical assessment, the LSTM-based predictions are evaluated against commonly used baseline models, including persistence (using the trained model with new data) and skill (the ability of the model to make predictions). These baselines represent the minimum performance expected in operational GNSS ionospheric modeling and serves as internal validation of the overall model’s performance. Evaluation metrics include, but are not limited to, root mean square error (RMSE), mean absolute error (MAE), and relative improvement over persistence (skill). Figure 3 compares the predictive performance of the proposed LSTM model against the persistence baseline on the independent dataset. RMSE increases over time, while persistence largely deviates from the LSTM model, showing the great strength and capability of the LSTM model for time series prediction over the Santa Maria station. For instance, the RMSE of the LSTM model increases from 0.24 TECU to 1.15 TECU from 30 minutes to 3 hours lead time, while that of persistence ranges from 0.41 TECU to 2.25 TECU, respectively.
FIGURE 3 Comparison between the RMSE of the LSTM model and persistence for single-station VTEC prediction.
For further evaluation, day-to-day variation of VTEC at 60 minutes lead time is shown in FIGURE 4. GPS TEC (orange curves) shows a strong diurnal cycle with expected daily peaks, while forecast (blue curves) matches these peaks across months, indicating that the LSTM captures the key deterministic component of TEC variability. TABLE 1 or the embedded metrics in Figure 4 summarizes an overall accuracy of the LSTM model using the performance metrics: MAE, RMSE, Bias, R, and skill. MAE and RMSE values change with season — with the lowest reported in July.
FIGURE 4 Day-to-day variation of VTEC at 60 minutes forecast during July to December 2019. The embedded metrics show the performance of the LSTM model for each month of the testing dataset.
Error increases toward December with the largest RMSE in March (0.549 TECU). September shows moderate error levels. Also, correlation is consistent across all months, which confirms the model’s capability to capture TEC changes and day-to-day variability patterns. The model is nearly unbiased as the bias is consistently close to zero, meaning that the LSTM does not drift systematically and shows that the model underpredicts GPS VTEC. This characteristic is important for operational GNSS corrections, because biased VTEC forecasts would translate to persistence positioning errors. Going by the skill values, even at 60 minutes forecast, the model provides ~27%-52% improvement over persistence. This result implies a major indicator of real predictive ability, especially for GNSS applications.
Statistical validation
Figure 5 presents the diagnostic of the validation dataset for the SMAR station at a 60-minute forecast horizon. It combines the distribution of prediction residuals (left) and density-based scatter comparison between predicted and observed VTEC values. These analyses help explain the overall agreement of the LSTM model forecast during validation.
FIGURE 5 Validation diagnostics at 60 minutes forecast horizon. (Left) Histogram of prediction residuals. (Right) Density scatter of predicted versus observed TEC.
The residual distribution is mostly concentrated near zero, which implies that most predictions deviate only slightly from observations. The right plot shows the scatter density plot of predicted VTEC against observed GPS VTEC. The points are tightly clustered along the dashed line, indicating that the model corresponds very well (98.2%) to the TEC variance in the validation period. Also, a RMSE of 0.39 TECU reflects a relatively low magnitude error. These findings support the reliability of the proposed LSTM model for VTEC forecasting.
Implications for GNSS Positioning
The cumulative distribution function (CDF) of the absolute equivalent L1 error, denoted by |∆ρ|, for the Santa Maria station at a forecast horizon of 60 minutes is shown in Figure 6.
FIGURE 6 CDF of residual VTEC equivalent L1 ranging error at the single station.
The CDF provides a direct positioning-relevant interpretation of model performance. The steep rise at small error values indicates that most samples exhibit low residual range errors, demonstrating strong correlation performance.
Evolutionary
This study demonstrates that LSTM-based machine learning provides a practical and effective approach for station-specific GNSS VTEC prediction during low solar activity. The LSTM model accurately reproduces diurnal and seasonal VTEC variability at the station level. Forecast skill remains stable across increasing horizons, while significant RMSE reductions over persistence confirm the model’s predictive value, supporting the feasibility of LSTM-based station-specific VTEC forecasting for operational GNSS applications. By leveraging historical GPS-derived VTEC time series, LSTM neural networks capture complex temporal dependencies that are difficult to model using conventional techniques. This approach offers a valuable complement to existing ionospheric correction models and represents a promising direction for future GNSS positioning systems. The results presented in Table 1 confirm that the proposed LSTM algorithm can derive an accurate predictive model as far as a 3-hour forecast. The proposed approach improves long-term ionospheric prediction and enhances positioning accuracy.
Month
MAE (TECU)
RMSE (TECU)
Bias (TECU)
R
Skill
Mar
0.39
0.55
-0.34
0.993
44.5
June
0.15
0.18
-0.12
0.994
25.8
Sep
0.26
0.35
-0.20
0.986
28.0
Dec
0.36
0.49
-0.28
0.994
52.8
Table 1 Comparison of VTEC performance metrics of the LSTM model at 60 minutes forecast.
While the results demonstrate the potential of AI-based modeling for station-specific VTEC prediction, further investigation is required to assess its limitations. Future research will investigate the sensitivity and robustness of the data-driven approach under extreme geomagnetic storm conditions and maximum solar activity considering multiple stations over the same region. These experiments will help evaluate the LSTM-based modeling reliance for a better positioning GPS accuracy. In addition, combining efficient training strategies with LSTM-based temporal learning offers a practical and scalable solution to station-specific VTEC prediction. The resulting models will bridge the gap between computationally expensive physics-based approaches and overly simplified empirical models, providing accurate, localized ionospheric corrections that directly enhance GPS positioning performance. Therefore, the Bayesian optimization technique would be integrated during model’s training to tune LSTM hyperparameters (Adekunle et al., 2025), with the aim of reducing computational cost and improving convergence and generalization in station-specific ionospheric modeling. It is very likely that machine learning will play a significant role in near-term ionospheric modeling/prediction for GNSS.
Dr. Taiwo Osanyin is a Ph.D. visitor at York University, Toronto, Canada. Her research interests include space physics, atmospheric sciences, statistics, and modeling of the upper atmosphere. Osanyin received a Ph.D. in space geophysics from the National Institute for Space Research, Brazil, an M.Sc. in nuclear science and engineering from Obafemi Awolow University, Nigeria, and a B.Sc. in engineering physics from Obafemi Awolow University, Nigeria.
Sunil Bisnath is a full professor in the Department of Earth and Space Science and Engineering at York University in Toronto. For more than 25 years, he has been actively researching precise GNSS-focused positioning and navigation solutions and applications. He holds an Honors Bachelor of Science degree and master of science degree in surveying science from the University of Toronto and a Ph.D. in geodesy and geomtics engineering from the University of New Brunswick.
• Adekunle AA, Fofana I, Picher P, Rodriguez-Celis EM, Arroyo-Fernandez OH, Zemouri R. (2025). Optimizing deep learning predictive models: A comprehensive review of RNN and its variant architectures. Applied Soft Computing. Oct 9:114015.
• Biswas T, Banerjee P and Paul A (2022). Impact of low-latitude ionospheric effects on precise position determination. Radio Science, 57(4): 1-11.
• Dabbakuti JK (2021). Modeling and optimization of ionospheric model coefficients based on adjusted spherical harmonics function. Acta Astronautica, 182: 286-294.
• Gonzalez J and Yu W (2018). Non-linear system modeling using LSTM neural networks. IFAC-PapersOnLine, 51(13): 485-489.
• Hochreiter S and Schmidhuber J (1997). Long short-term memory. Neural Computation, 9:1735-1780.
• Jee G, Lee HB, Kim YH, Chung JK, Cho J (2010). Assessment of GPS global ionosphere maps (GIM) by comparison between CODE GIM and TOPEX/Jason TEC data: Ionospheric perspective. Journal of Geophysical Research: Space Physics. 115: A10.
• Kaselimi M, Voulodimos A, Doulamis N, Doulamis A, Delikaraoglou D. (2020). A causal long short-term memory sequence to sequence model for TEC prediction using GNSS observations. Remote Sensing. 12(9): 1354.
• Noor MH and Ige AO (2025). A survey on state-of-the-art deep learning applications and challenges. Engineering Applications of Artificial Intelligence. 159: 111225.
• Osanyin TO, Candido CM, Becker-Guedes F, Migoya-Orue Y, Habarulema JB, Obafaye AA, Chingarandi FS, Moraes-Santos SP (2023). Performance of a locally adapted NeQuick-2 model during high solar activity over the Brazilian equatorial and low-latitude region. Advances in Space Research. 72(12): 5520-38.
• Osanyin TO, Maria Nicoli Candido C, Becker-Guedes F, Migoya-Orue Y, Habarulema JB (2025). Ingestion of GNSS-Derived-TEC Into NeQuick 2 Model Over South America. Space Weather. 23(12): e2024SW004212.
• Reddybattula KD, Nelapudi LS, Moses M, Devanaboyina VR, Ali MA, Jamjareegulgarn P, Panda SK (2022). Ionospheric TEC forecasting over an Indian low latitude location using long short-term memory (LSTM) deep learning network. Universe. 8(11): 562.
• Sarker IH (2021). Deep learning: a comprehensive overview on techniques, taxonomy, applications and research directions. SN Computer Science. 2(6): 1-20.
• Seemala GK, Katual I, Kapil C, Vichare G (2023). Seasonal and solar activity dependence of TEC over Bharati station, Antarctica. Polar Science. 38: 101001.
• Seemala GK, Valladares CE. Statistics of total electron content depletions observed over the South American continent for the year 2008 (2011). Radio Science. 46(05): 1-4.
• Thompson Neil C, Kristjan G, Keeheon L, Manso Gabriel F (202). The computational limits of deep learning. Cornell University, arXiv:2007.05558, 10: 2.
• Zhang R, Li H, Shen Y, Yang J, Li W, Zhao D, Hu A (2025). Deep learning applications in ionospheric modeling: progress, challenges, and opportunities. Remote Sensing. 17(1): 124.
In the Jan.-Feb. 2026 edition of GPS World magazine, we asked our experts, with the increase in reported GNSS jamming incidents affecting commercial aviation, what technical approaches show the most promise for ensuring reliable PNT?
Check out their responses below:
Mitch Narins
Mitch Narins, Strategic Synergies
“Aviation encompasses a diverse range of applications and missions, requiring support from various positioning, navigation and timing (PNT) solutions. As with most challenges, employing multiple strategies often yields optimal outcomes, particularly in scenarios where a one-size-fits-all approach is impractical. I firmly believe in the enduring importance of the guidance historically imparted to navigators: to ‘utilize all available means.’
However, it is crucial to recognize that GNSS jamming is not the primary concern. Fortunately, aviation has historically and continues to rely on resilient ground-based alternatives, although many of these systems have been in service for several decades and require upgrades and replacements. The more pressing issue for aviation and other PNT applications lies in spoofing. I strongly advocate for the abandonment of the concept of employing a single, non-resilient solution for critical functions, a practice once referred to as ‘GPS sole-means.’”
Miguel Armor
Miguel Amor, Septentrio
“Ensuring reliable navigation and timing in the presence of increasing GNSS jamming requires both stronger technology and faster modernization in aviation. Today, the most effective protection is a layered approach, starting with advanced interference mitigation at the receiver level. Modern anti-jamming algorithms and robust signal processing, combined with multi-frequency and multi-constellation capabilities, provide important diversity and allow systems to continue operating even in difficult RF environments. CRPA antennas also further improve resilience by enabling spatial filtering and adaptive nulling, suppressing jammers before they impact the receiver.”
Paul McBurney
Paul McBurney, oneNav
“Controlled Reception Pattern Antennas (CRPAs) and adoption of L5. As discussed by Brad Parkinson, Ph.D., at the most recent National Space-based PNT Advisory Board (PNTAB) meeting, the CRPA is the big-hammer anti-jam solution. It’s great to hear that the ITAR restrictions have been removed. For commercial aviation, the long pole to deployment is likely dependent on an FAA certification procedure. The other advice from PNTAB is that L5 has a much smaller denial radius. So, once again, the U.S. Government and FAA are on the critical path: We need L5 to be declared healthy and usable, which likely requires an upgrade of RTCA MOPS.”
Tactical air-lifters such as the Airbus A400M, Lockheed C-130 and Boeing C-17 require precise runway roughness assessments to operate safely on unpaved surfaces. An autonomous rover system developed at the Royal Military Academy of Belgium uses RTK/PPK GNSS positioning and sensor fusion to deliver centimeter-level height measurements, drastically reducing survey time. The system provides a practical solution for rapid runway certification across military operations and humanitarian response missions.
Unpaved runway assessment
The Airbus A400M Atlas, the Lockheed C-130 Hercules and the Boeing C-17 Globemaster III routinely operate from unpaved runways in harsh environments far from established infrastructure. Before these aircraft can safely land, flight crews require accurate runway roughness data to assess whether the surface meets operational limits. This assessment relies on precise, quantitative measurements of the runway’s surface characteristics — a task that traditionally requires specialized survey teams and hours of manual work with GNSS equipment, resources that are often unavailable in high-tempo tactical or emergency response scenarios.
The challenge is particularly acute because different aircraft have specific roughness tolerances. The A400M uses an equivalent bump height (EBH) methodology, while Boeing employs its Boeing Bump Criteria. The EBH requires vertical measurement precision of ±1 cm over wavelengths ranging from 5 to 100 meters. Meeting these stringent requirements with rapid, field-deployable methods has remained an operational gap — until now.
At the Royal Military Academy (RMA) of Belgium, we developed a novel solution to this critical challenge. Our system features a rugged, autonomous unmanned ground vehicle that can rapidly perform a centimeter-accurate runway assessment with minimal user intervention. It represents a fusion of robotics, geodesy, and advanced GNSS techniques, designed specifically for ease of use by military teams in the field. The system is called Belgian Navigational Surface Inspector (BENSI).
FIGURE 1 shows the BENSI system during a mission at a tactical landing zone with the A400Min the background. FIGURE 2 shows the BENSI system being configured by the operator during a landing preparation.
Figure 1 The autonomous UGV (BENSI) during a mission at a tactical landing zone with the A400M Atlas in the background.Figure 2 The BENSI system being configured by the operator during the beach landing preparation at Rømø, Denmark.
This article details the system’s architecture, the integration of multiple technologies that enable the stringent precision required achieved by GNSS and sensor fusion, self-driving capabilities and its successful deployment in demanding field tests. We present a military graded solution for ensuring tactical airlift safety, enabled by modern, accessible GNSS technology and robotics.
Quantifying runway roughness
Deployable Air Traffic Management (DATM) and Pathfinders are responsible for ensuring the safety of aircraft operations on unpaved runways. They are tasked with assessing the quality of the runway and the Runway Safety Area (RSA) to ensure that the aircraft can land safely. The pilots analyze their assessment and take the final decision to land.
FIGURE 3 is an example of a landing zone having an unpaved runway that needs to be evaluated for landing. FIGURE 4 overviews the landing zone by mapping and indicating features of the runway that need to be considered by the pilots. An important aspect of the DATM’s assessment is the runway’s roughness, which is quantified by the EBH.
Figure 3 An example of a tactical landing zone.
For modern military transport aircraft operations, runway roughness assessment is a critical safety parameter. Both major manufacturers — Airbus with its EBH methodology and Boeing with its Boeing Bump Criteria — have developed sophisticated approaches to characterize runway longitudinal roughness profiles. These methods analyze height variations over wavelengths ranging from 5 to 100 meters, requiring vertical measurement precision of ±1 cm. This rigorous assessment is essential to reduce aircraft structural fatigue, minimize maintenance costs, prevent exceedance of design limit loads, and ultimately ensure safe operations. For the A400M specifically, Airbus requires EBH characterization to determine operational limitations of the aircraft’s maximum payload.
Figure 4 A typical mapping of a landing zone showing a condensed overview of DATM’s assessment.
Traditionally, achieving this precision would involve a painstaking survey conducted by specialists using a GNSS survey system mounted on a trolley requiring human guidance along the measurement tracks totaling more than 3 km of length. For military units like the DATM and Pathfinder teams, who often are the first on the ground, this is impractical. They need a system that is rapid, reliable, simple to operate without a surveying background, and robust enough for field conditions.
A GNSS-Centric design
Our solution is a two-part system designed for rapid deployment: a portable GNSS base station and autonomous rover. FIGURE 5 shows a schematic overview of the system architecture.
Figure 5 A schematic overview of the system architecture, showing the data (NMEA) and correction (RTCM) flow between the base station, rover and operator.
The base station: The system’s anchor
Housed in a compact, portable case, weighing just 2 kg including tripod and radios (as seen in FIGURE 2), it serves as the operational hub. Once set up on its lightweight tripod, it performs an automatic survey to establish its precise coordinates. Its primary role for positioning is to generate and transmit Radio Technical Commission for Maritime Services (RTCM) 3.x correction data to the rover via a robust long-range radio link (operating in the868/900MHz bands).
Beyond its GNSS duties, the base station acts as a self-contained command center. It hosts a Wi-Fi hotspot and a web server, allowing the operator to connect with any standard tablet, smartphone or laptop. This web interface is used for mission planning, command and control of the rover, and real-time monitoring of survey progress. At the end of the mission, the operator can download the EBH data and additional quality metrics of the runway for analysis such as a summary report of the complete measurement, a gradient analysis, and a runway map highlighting zones with bumps or troughs exceeding the specified criteria.
An autonomous, all-terrain surveyor
The UGV is a lightweight but rugged platform chosen for its durability and open-source software architecture, which allows for deep integration of our custom navigation and control algorithms. The rover has been designed to be able to traverse rough terrain and survive in harsh weather conditions. The UGV consists of two parts, the chassis (11 kg) and the processing payload(8 kg). The heart of the rover is the processing payload, which contains a sophisticated sensor suite designed for high-precision localization and navigation.
■ Primary GNSS receiver. A high-grade, multi-constellation Septentrio receiver with a Calian/Tallysman GNSS antenna provides the main source of positioning information.
■ GNSS heading. A second Calian/Tallysman GNSS antenna, set up in a moving-base configuration, provides degree-accurate true heading, which is critical for maintaining precise track-following.
■ Inertial measurement unit (IMU). An industrial-grade Xsens IMU provides high-frequency data on the rover’s orientation and acceleration, bridging any brief GNSS outages, providing the sensor fusion algorithm with high-rate data, and helping to smooth the final trajectory.
■ Radio communication. The radio modules provide robust long-range communication with the base station operating in the 868/900MHz bands.
■ Wheel odometry. Encoders on the rover’s wheels provide continuous velocity information, acting as a crucial input for the sensor fusion algorithm. All sensor data is fed into an onboard mini-PC running the Robot Operating System, a flexible framework for developing robotic applications.
Path to precision
Achieving centimeter-level accuracy on a moving platform in challenging environments requires more than just a good GNSS receiver. Our approach is built on a robust foundation of sensor fusion and a dual processing strategy using real-time kinematic and post-processing kinematic (RTK/PPK). An extended Kalman filter (EKF) is at the core of the rover’s navigation software. The EKF continuously fuses data from the GNSS receivers, IMU and wheel encoders to produce a single, high-integrity “pose” (position and orientation) estimate.
For runway surveying, we employ two modes of GNSS processing:
RTK. During the mission, the rover uses the RTCM corrections from the base station to compute a centimeter-accurate position in real-time. This is used for autonomous navigation, allowing the rover to follow its generated mission plan configured by the operator with high precision.
PPK. While RTK provides excellent real-time results, the most demanding applications benefit from post-processing. Both the rover and the base station log all raw GNSS observables during the mission. After the survey is complete, these raw data files are processed together which allows for more rigorous quality control and can often resolve ambiguities or fix cycle slips that were not solvable in real-time, providing the definitive, highest accuracy trajectory for the EBH analysis.
A final crucial step is extracting the height profile for each EBH track and subsequently transforming and reformatting this data for Airbus’ AssurTool. The step also is automated and carried out by the software. It takes care of the following:
■ The conversion of the geodetic coordinates (latitude, longitude, and height above the World Geodetic System 1984 [WGS84] ellipsoid) to Universal Transverse Mercator plane coordinates and orthometric heights (heights relative to a geoid).
■ The extraction of the height profile of each EBH track.
■ Quality control of the precision of the height profile flags tracks that do not meet the required accuracy or show inconsistencies.
■ The transformation and reformatting of this data for Airbus’ AssurTool.
Self-driving capabilities
The rover uses a navigation framework with a custom planner for generating smooth, curved paths that match the rover’s turning capabilities and steers the rover using a controller based on the Regulated Pure Pursuit tracking algorithm. A specialized lane-generation algorithm creates optimal survey patterns from runway corner points, with behavior-tree recovery strategies for robust operation.
FIGURE 6 shows a typical EBH survey pattern generated from the mission plan and executed by the rover and a depiction of how the rover plans the smooth curved path between the lanes.
Figure 6 Features of the navigation framework used for planning the EBH tracks. (a) A typical EBH survey pattern generated from the mission plan and executed by the rover. (b) A depiction of how the rover plans the smooth curved path between the lanes.
A streamlined workflow
The system was designed from the ground up to be operated by non-surveyors. A typical mission workflow is as follows:
Setup. The operator places the base station on a tripod near the runway and unfolds the rover. The entire hardware setup takes less than 10 minutes.
Mission planning. Using a ruggedized tablet (or any other device with a web browser), the operator connects to the base station’s WiFi and opens the web interface. They define the runway by entering the coordinates of the runway’s corners. The software automatically calculates the EBH lines based on the required spacing. FIGURE 7a shows the user interface displayed on a tablet, showing the EBH mission configuration page.
Figure 7a The user interface displayed on a tablet, showing the EBH mission configuration.
Execution. The operator initiates the mission, and the UGV autonomously navigates to the start of the first line and begins the survey. The operator can monitor and control the rover’s progress, position, and GNSS quality status in real-time on the web interface. FIGURE 7b shows the user interface displayed on a tablet, showing the rover control, the real-time status of the UGV and the measurements.
Figure 7b The tablet showing the rover control and the real-time status of the UGV and the EBH results.
Data retrieval. Upon completion, the rover returns to the base station. The system automatically processes the data, producing downloadable files formatted for direct import into Airbus’ AssurTool and additional useful quality metrics for the operator. These consist of a summary report of the complete measurement, a gradient analysis, and a runway map highlighting zones with bumps or troughs exceeding the specified criteria.
Analyzing the data
Once the rover completes its survey and returns to the base station, the system automatically initiates post-processing of the collected data. This critical step validates the quality of every measurement and generates operator-ready outputs for both Airbus’ AssurTool and field assessment.
The post-processing pipeline applies rigorous quality criteria to each survey line. Lines failing these criteria are automatically flagged with detailed diagnostics explaining the cause.
For operational decision-making, the system generates a comprehensive visualization report. The operators receive planimetric maps showing the height profile plots and a detailed gradient analysis identifying critical slope transitions. A key capability is the generation of a 3D interpolated height map of the entire runway surface. This color-coded surface map provides an intuitive view of the runway’s topography, clearly highlighting zones with excessive bumps, depressions, or gradient anomalies that facilitates the assessment of the runway.
These analysis reports are accessible through the web interface for immediate download to the operator’s tablet. FIGURES 8 shows examples of the visualization report.
Figure 8a 2D height and gradient contour maps of two surfaces generated by the BENSI system. (a) A height contour map of two landing zone (LZ) surfaces automatically generated by the BENSI system. Figure 8b A gradient contour map of two LZ surfaces automatically generated by the BENSI system.
Proven performance
The UGV system is a mature prototype that has been validated in numerous international military exercises. It has successfully surveyed tactical landing zones in varied environments, from the desert strips of Yuma, Arizona, and 29 Palms, California, to the sandy shores of Denmark and fields in France, Portugal and Italy. In all tests, the system has consistently delivered the sub-centimeter height precision required for A400M EBH certification.
2025 Rømø Head-to-Head Trial.During beach-landing preparations in August 2025, our autonomous rover and a manual system (human-guided trolley) using a professional GNSS survey system ran side-by-side on a 1 000m landing zone on the Rømø beach in Denmark. The BENSI solution matched the manual survey system height profile with a standard deviation of 8mm and demonstrated significantly better lane-tracking consistency (mean deviation: 8,5 cm vs 16 cm and deviation error: 3 cm vs 9 cm). FIGURE 9 shows the height-error distribution between the BENSI system and the manual survey system at Rømø, Denmark.
Figure 9 Height-error distribution between the BENSI system and the manual survey system at Rømø, Denmark.
Rapid humanitarian response
While BENSI was conceived for tactical airlift operations, its capabilities extend naturally to humanitarian assistance and disaster-relief missions. Belgium’s civil rapid-response unit Belgian First Aid & Support Team (B-FAST) routinely deploys doctors, paramedics, firefighters, and other professionals worldwide following earthquakes, floods, or epidemics. Leveraging the A400M’s ability to land on short, unpaved strips away from congested or contested airfields drastically cuts transit times — but only if the runway’s condition can be certified quickly.
The BENSI systems enables a DATM team to quickly relay an EBH report and awareness map of the immediate area to the inbound aircrew. This rapid assessment unlocks critical early access for life-saving medical supplies and personnel when every hour counts.
Conclusion and the Road Ahead
The fusion of autonomous robotics and high-precision GNSS offers a powerful solution to the critical challenge of certifying unpaved runways. Our system saves valuable time, reduces the burden on specialized personnel, and provides objective, high-quality data that directly enhances the safety of tactical airlift operations.
Development is ongoing. Our current efforts focus on several key areas:
■ Improving navigation in degraded environments. We are exploring tighter coupling between the GNSS and IMU to provide more robust navigation through areas of poor satellite visibility.
■ RSA assessment. We are experimenting with integrating a lidar sensor to generate a 3D point cloud of the runway and its surroundings. This will automate obstacle detection and the assessment of the RSA, though we are carefully working to mitigate potential electromagnetic interference from the lidar that can interfere with GNSS reception.
■ Handheld corner point device. To further improve absolute accuracy, we are developing a small, handheld device that uses RTK corrections from the base station, allowing operators to mark the runway corners with centimeter-level precision.
This project demonstrates a clear application of GNSS technology in a demanding military aviation context, with broader implications for any field requiring rapid and precise surface profiling, from civil engineering to disaster response.
Development Team
■ Pieterjan De Meulemeester ([email protected]) is a Ph.D. research engineer at the RMA of Belgium.
■ Alain Muls ([email protected]) is professor at the RMA of Belgium. He teaches the courses Military Satellite Based Positioning andMilitary Geodesy.
■ Jarno Van Audenhoven ([email protected]) is a Robotics Development and Research Engineer at the RMA of Belgium.
■ Pascal De Kimpe is a technician at the RMA of Belgium.
■ The BENSI system was developed by the R&D team at the RMA of Belgium in collaboration with Belgian Defense. The system has been successfully field-tested during international military exercises and is being evaluated for operational deployment.
All photos courtesy of BENSI Development Team of the Royal Military Academy of Belgium