The adoption of the new, modernized National Spatial Reference System (NSRS) is rapidly approaching, with official implementation now expected in the first quarter of 2027.
One of the most common questions I receive during presentations is: How will the National Geodetic Survey (NGS) account for plate tectonics in the modernized NSRS, and what does that mean for my geospatial products and services?
First, I have some very sad news to share.

Our friend and colleague, Dr. Chris Pearson, unexpectedly passed away while in Cape Town attending the May 2026 International Federation of Surveyors (FIG) conference. At the time, he was serving as a Geodetic Advisor for Trimble and as co-chair of FIG Commission 5.2.
Chris previously worked for the National Geodetic Survey (NGS) as a Geodetic Advisor, where he played a key role in developing the comprehensive block model of crustal deformation — widely known as HTDP — across the western United States, including Alaska.
He was an active and respected member of several professional organizations and will be greatly missed by the entire geodetic and surveying community.
Now, let’s discuss how the National Geodetic Survey (NGS) will handle plate tectonics in the modernized National Spatial Reference System (NSRS) and what this will mean for users’ geospatial products and services.
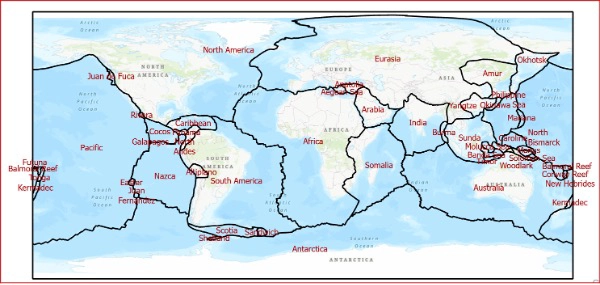
Plate tectonics is the scientific theory that describes how Earth’s outer shell, known as the lithosphere, is divided into large, rigid pieces called tectonic plates. These plates float atop the hotter, more ductile rock in the mantle below and move very slowly — roughly at the same rate as your fingernails grow, about 1 to 10 centimeters per year.
So why does plate tectonics matter for geodetic coordinates? Because the most significant geological activity — including earthquakes, volcanic eruptions, and crustal deformation — occurs primarily at the boundaries where these plates interact.
My last newsletter highlighted several activities by the North Carolina 2022 Reference Frame Working Group (NC RFWG) that are addressing this issue and other challenges related to the implementation of the new NSRS.
During my presentations on the modernized NSRS, I always show the National Geodetic Survey (NGS) maps that illustrate the approximate horizontal and vertical changes expected when the new Terrestrial Reference Frames (TRFs) are adopted, with coordinates referenced to epoch 2020.00. These maps provide a high-level (“30,000-foot”) overview of the anticipated changes. However, they do not include the level of detail that many users are looking for.
Participants at these seminars and meetings consistently want to know the expected coordinate differences for their specific state or local region, and how the time-dependent components will impact their work.
Most geospatial users now understand that International Terrestrial Reference Frame (ITRF) coordinates include a velocity component caused by tectonic plate movement. To manage these changing coordinates, the National Geodetic Survey (NGS) plans to incorporate time-dependent modeling. NGS has developed two key models — EPP2022 and IFDM2022 — to make time-dependent geodetic control practical and usable.
- EPP2022 (Euler Pole Parameters) describes the rigid rotation of tectonic plates.
- IFDM2022 (Intra-Frame Deformation Model) computes the internal deformation and drift within a tectonic plate.
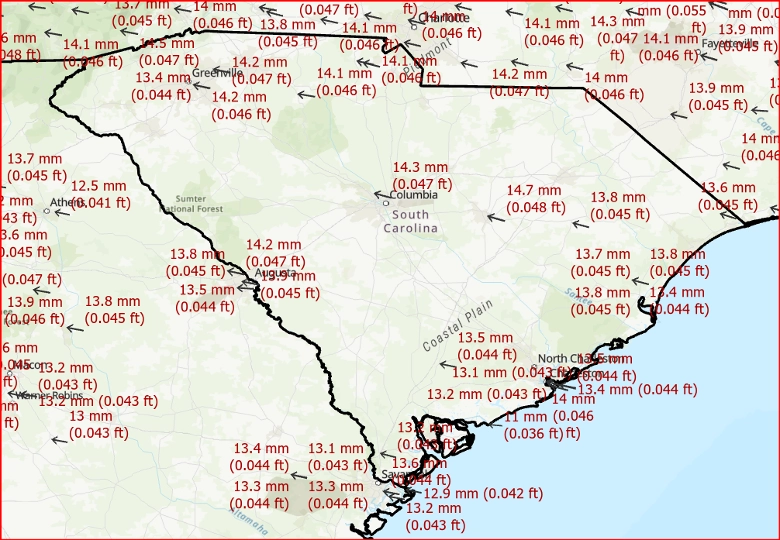
As shown in the figure below, the NOAA CORS Network station COLA in Columbia, South Carolina — located on the North American Plate — is moving at approximately 0.05 feet (14 mm) per year.
This velocity is provided on the published ITRF2020 position and velocity data for the station (NGS CORS Position and Velocity Sheet for COLA). As a result, a surveyor working in June 2026 would observe a shift of about 0.3 feet in the ITRF2020 horizontal coordinates compared to the 2020.00 reference epoch, solely due to tectonic plate motion.
Motion due to plate movement (rates per year) – based on ITRF2020 velocity rates
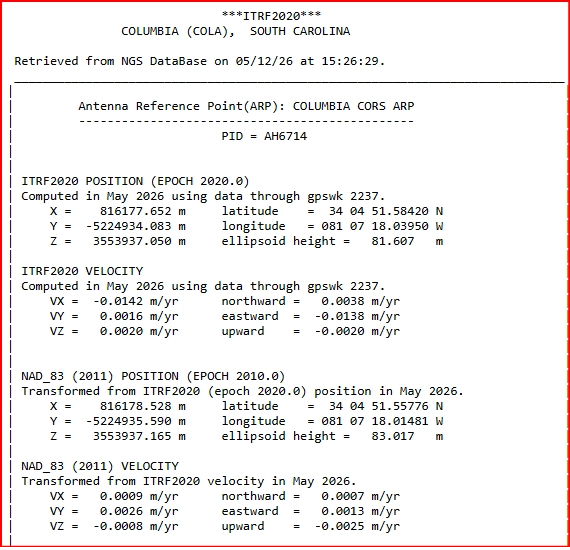
The National Geodetic Survey (NGS) provides detailed information for all NOAA CORS Network (NCN) stations on the NGS NCN Station Pages.
In the section titled “Coordinates and Velocities”, simply click the Position and Velocity button to view the station’s ITRF2020 coordinates and velocities (referenced to epoch 2020.00), as well as the NAD 83 (2011) coordinates and velocities (referenced to epoch 2010.00).
NGS CORS position and velocity sheet for COLA
So, what does this mean for users?
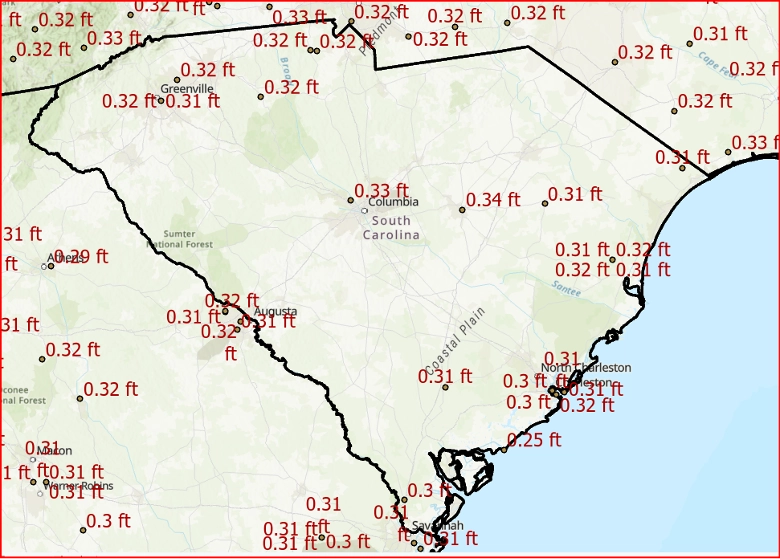
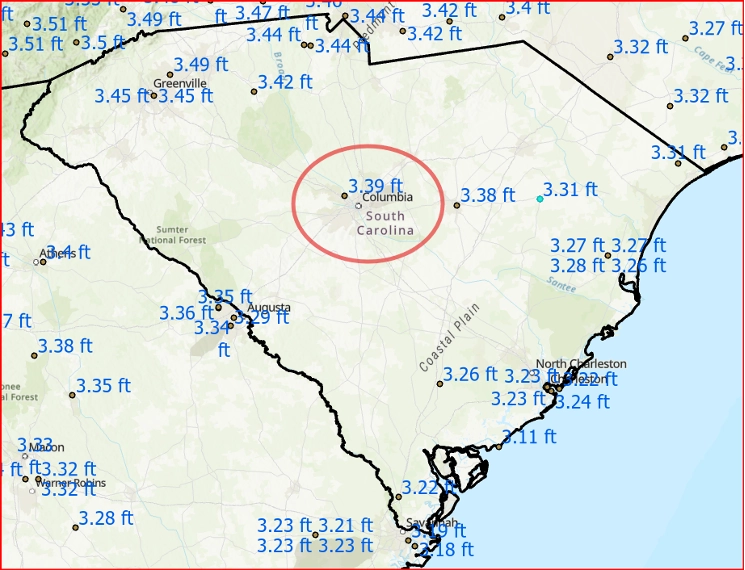
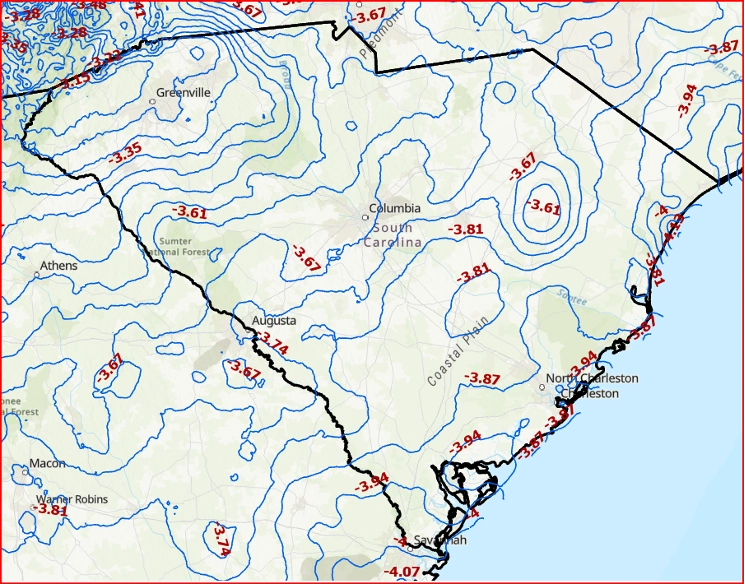
As previously mentioned, the National Geodetic Survey (NGS) is expected to adopt the new modernized NSRS in the first quarter of 2027. The figure below shows the change in ITRF2020 coordinate values between epoch 2020.00 and 2027.00 for NOAA CORS Network (NCN) stations in South Carolina. This shift of approximately 0.33 feet (10 cm) is the result of seven years of tectonic plate motion.
ITRF2020, Epoch 2020 to ITRF2020, Epoch 2027 (units ift)
That said, what will the change in NATRF2022 coordinate values be between epoch 2020.00 and 2027.00?
This is where NGS’s EPP2022 and IFDM2022 models become essential. My February 2022 and July 2024 GPS World newsletters discussed the Euler Pole Parameters (EPP) process in detail.
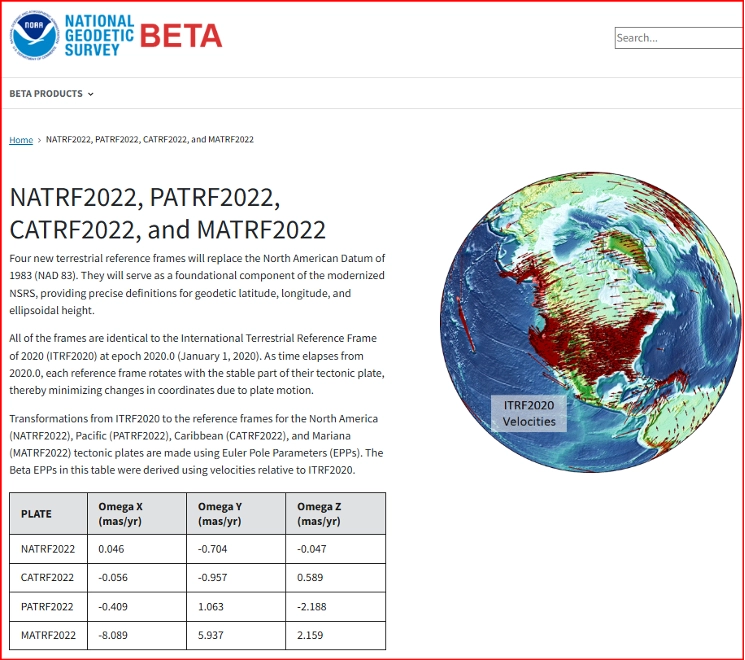
The Beta NATRF2022 website provides the Euler Pole Parameters (EPP) needed to define the relationship between ITRF2020 and the new NATRF2022 frames for the North American, Caribbean, Pacific, and Mariana plates, as outlined in NGS’s Blueprint Part 1 document. The values in the table have proven especially useful to programmers developing and testing their software.
Beta Values for EPP
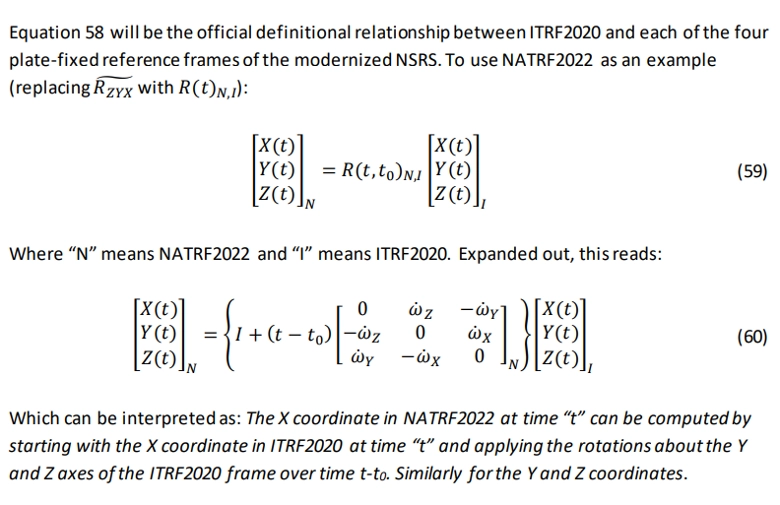
As stated in Blueprint Part 1, the National Geodetic Survey (NGS) will define the official relationship between ITRF2020 and the four NSRS Terrestrial Reference Frames (TRFs) through Equation 59. This equation uses the rotation matrix provided in Equation 58, which results in Equation 60.
See the box titled “Official Relationship Between ITRF2020 and the Four NSRS TRFs” for the equations.
Official relationship between ITRF2020 and the four NSRS TRFs

So, what does this mean for surveyors?
The primary purpose of the EPP2022 model is to remove the rigid tectonic plate motion from the coordinates. After applying the EPP2022 model to the ITRF2020 coordinates at epoch 2027.00, the resulting NATRF2022 horizontal coordinates for station COLA (epoch 2027.00) will change by only 0.04 feet (12 mm).
EPP applied
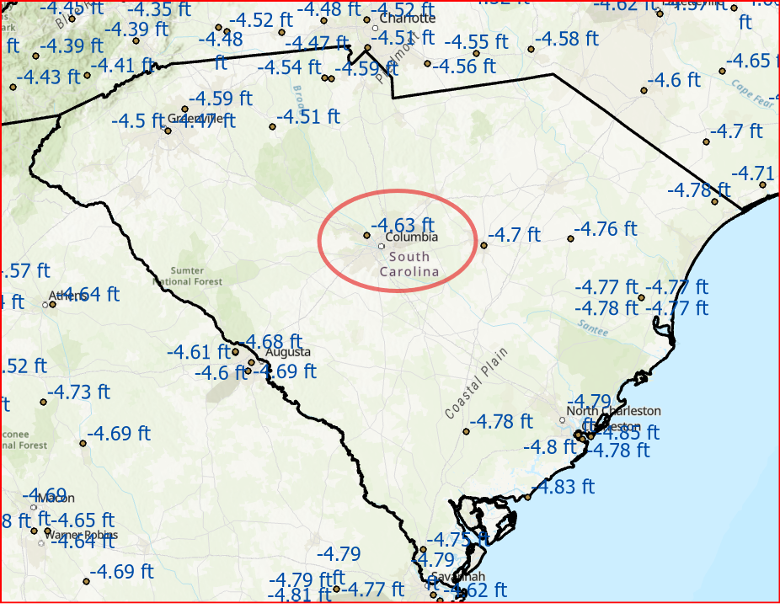
NATRF2022, Epoch 2020 to NATRF2022, Epoch 2027 in SC (units ift)
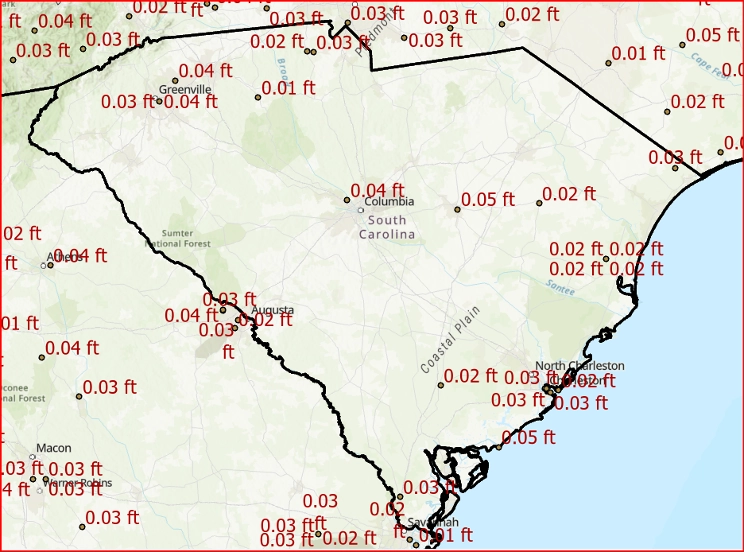
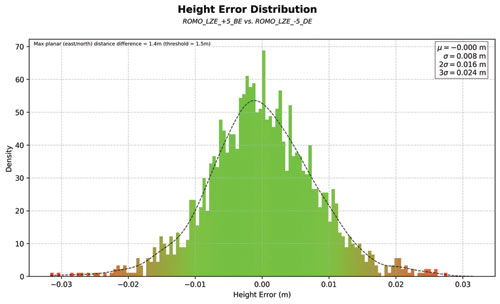
As shown in the figure, the EPP2022 model removes most of the horizontal movement caused by seven years of tectonic plate motion — reducing it to just 0.04 feet (1.2 cm) at station COLA. In other words, the EPP model effectively removes the vast majority of plate tectonic effects.
Additionally, the plot shows that the relative horizontal differences between nearby marks are very small — typically less than 0.01 feet (0.3 cm).
As previously mentioned, the NGS maps provide a high-level (“30,000-foot”) view of the expected changes between the current NSRS and the new modernized NSRS. So, what are the anticipated differences between NAD 83 (2011) and NATRF2022 specifically in South Carolina?
The figures below illustrate the differences in both horizontal position and ellipsoid heights between NAD 83 (2011) and NATRF2022 coordinates across South Carolina.
NAD83 (2011), Epoch 2010 to NATRF2022, Epoch 2020 Horizontal Changes in SC (Units ift)
NAD83 (2011), Epoch 2010 to NATRF2022, Epoch 2020 Ellipsoid Height Changes in SC (Units ift)
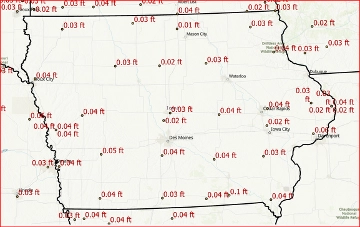
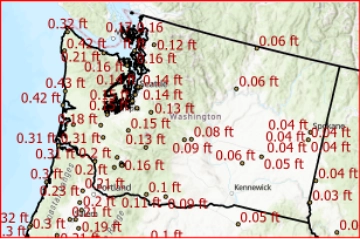
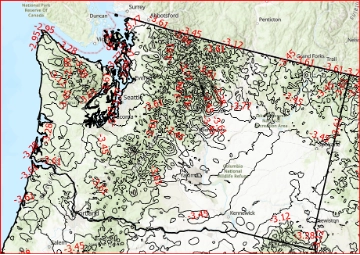
The magnitude of these changes varies depending on your location. To illustrate this, I’ve provided two additional examples: one for Iowa and one for Washington State. As the plots clearly show, the differences in these states are noticeably different from those depicted for South Carolina.
NAD83 (2011), Epoch 2010 to NATRF2022, Epoch 2020 Horizontal Changes (Units ift)
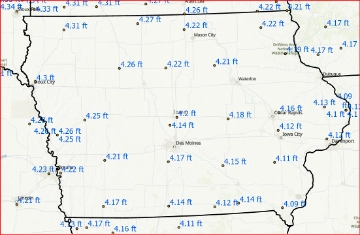
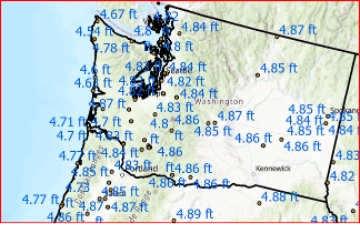
That said, the differences between NATRF2022 at epoch 2020.00 and epoch 2027.00 in Iowa and Washington State — after applying the EPP2022 model — are very similar to the values shown for South Carolina.
However, readers should note that the differences in Washington State increase as you move toward the coast. This is because the area lies near the boundary between the North American Plate and the Pacific Plate. The Juan de Fuca Plate, a small microplate in the eastern North Pacific, is also actively involved in this region.
(See the box titled “Juan de Fuca Plate.”)
NATRF2022, Epoch 2020 to NATRF2022, Epoch 2027 (units ift)EPP Applied
The Juan de Fuca plate or Juan de Fuca microplate is a small oceanic tectonic plate (microplate) generated from the Juan de Fuca Ridge that is subducting beneath the northerly portion of the western side of the North American plate at the Cascadia subduction zone.

What about orthometric height changes in the new NSRS?
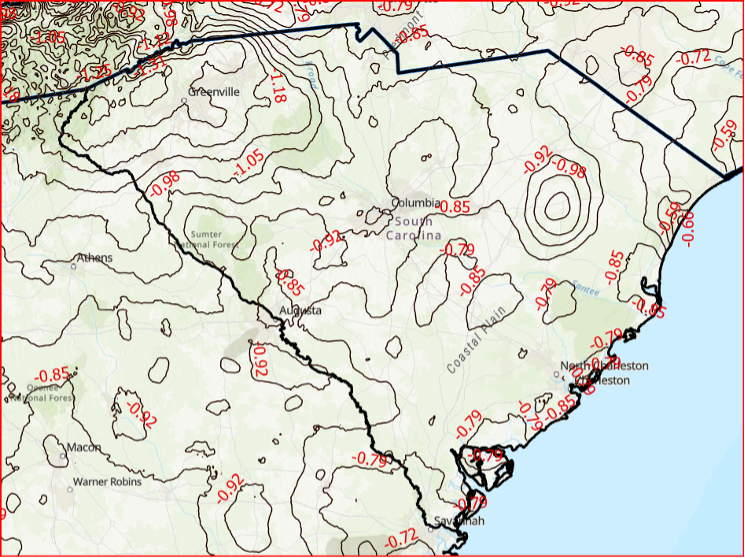
As an example, the orthometric height differences between NAPGD 2022 and NAVD 88 in South Carolina are expected to range from approximately -0.8 feet to -1.3 feet.
Difference between NAPGD2022 and NAVD 88 (Units ift) in S.C.
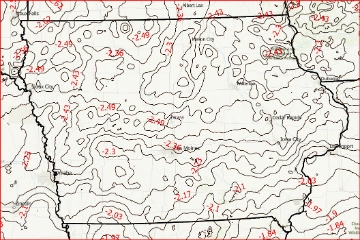
The differences between NAPGD 2022 and NAVD 88 vary significantly depending on your location. The figures below illustrate these orthometric height differences for Iowa and Washington State as examples.
Difference between NAPGD2022 and NAVD 88 (Units ift)
The new NSRS will use a gravimetric geoid (GEOID2022) rather than a hybrid geoid (GEOID18) to compute GNSS-derived orthometric heights.
During my presentations, I always remind participants that a hybrid geoid is not a “true” geoid. It is simply a transformation model that converts ellipsoid heights in one reference frame to orthometric heights in a specific vertical datum. Specifically, GEOID18 is a transformation tool that allows users to derive NAVD 88 orthometric heights from NAD 83 (2011), epoch 2010 ellipsoid heights.
The figure below shows the differences between the gravimetric geoid model GEOID2022 and the hybrid geoid model GEOID18.
Important note: Users cannot use GEOID18 with NATRF2022 ellipsoid heights to obtain NAVD 88 orthometric heights. Instead, GEOID2022 must be used with NATRF2022 ellipsoid heights to compute orthometric heights in the new vertical datum, NAPGD 2022.
Differences between GEOID2022 and GEOID18 in SC (Units ift)
As noted at the outset of this newsletter, the transition to the modernized National Spatial Reference System (NSRS) is rapidly approaching, with official implementation scheduled for the first quarter of 2027.
The National Geodetic Survey (NGS) released the following announcement on May 28, 2026:
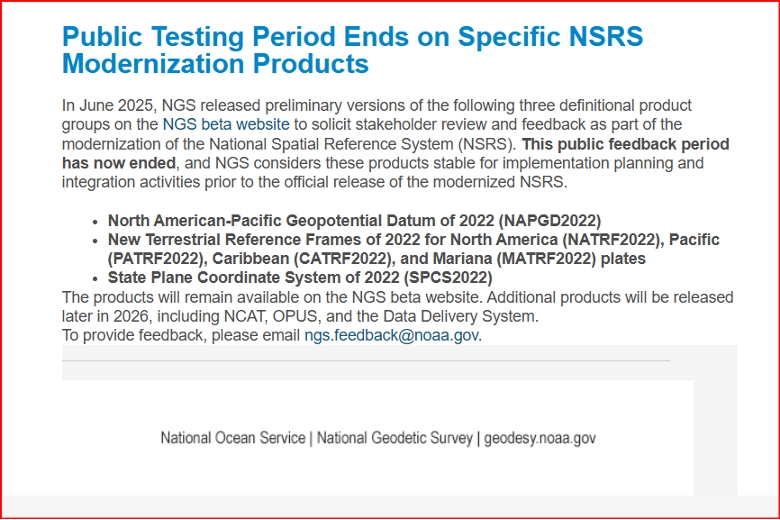
Public Testing Period Ends for Key NSRS Modernization Products
NGS has declared the following products stable and ready for implementation planning and integration activities ahead of the official release:
- North American-Pacific Geopotential Datum of 2022 (NAPGD2022)
- New Terrestrial Reference Frames of 2022:
- North America (NATRF2022)
- Pacific (PATRF2022)
- Caribbean (CATRF2022)
- Mariana (MATRF2022)
- State Plane Coordinate System of 2022 (SPCS2022)
Additional modernization products, including NCAT, OPUS, and the Data Delivery System, are scheduled for release later in 2026.
NGS news
Public testing period ends on specific NSRS modernization products
Image: NOAA
This newsletter highlighted the role of the EPP2022 model in accounting for plate tectonics and illustrated the anticipated local differences between the current National Spatial Reference System (NSRS) and the upcoming modernized version.
Future editions will continue to explore additional NGS Beta products as they are released later in 2026.